

Go to the source code of this file.
Data Structures | |
| struct | SL_Quaternion |
| Structure representing a quaternion. More... | |
| struct | SL_Vector2 |
| Structure representing a generic 2-dimensional vector. More... | |
| struct | SL_Uint2 |
| Structure representing a generic 2-dimensional unsigned integer vector. More... | |
| struct | SL_Vector3 |
| Structure representing a generic 3-dimensional vector. More... | |
| struct | SL_Vector4 |
| Structure representing a generic 4-dimensional vector. More... | |
| struct | SL_Transform |
| Structure representing a transformation (translation and rotation) More... | |
| struct | SL_Uchar2 |
| Structure representing an unsigned char 2-dimensional vector. More... | |
| struct | SL_Uchar3 |
| Structure representing an unsigned char 3-dimensional vector. More... | |
| struct | SL_Uchar4 |
| Structure representing an unsigned char 4-dimensional vector. More... | |
| struct | SL_Matrix4f |
| Structure representing a generic 4*4 matrix. More... | |
| struct | SL_Matrix3f |
| Structure representing a generic 3*3 matrix. More... | |
| struct | SL_PoseData |
| Structure containing positional tracking data giving the position and orientation of the camera in 3D space. More... | |
| struct | SL_PlaneData |
| Structure representing a plane defined by a point and a normal, or a plane equation. More... | |
| struct | SL_IMUData |
| Structure containing data from the IMU sensor. More... | |
| struct | SL_BarometerData |
| Structure containing data from the barometer sensor. More... | |
| struct | SL_MagnetometerData |
| Structure containing data from the magnetometer sensor. More... | |
| struct | SL_TemperatureData |
| Structure containing data from the temperature sensors. More... | |
| struct | SL_SensorsData |
| Structure containing all sensors data (except image sensors) to be used for positional tracking or environment study. More... | |
| struct | SL_VoxelMeasureParameters |
| Parameters controlling voxel decimation in sl_retrieve_voxel_measure. More... | |
| struct | SL_PositionalTrackingStatus |
| Lists the different status of positional tracking. More... | |
| struct | SL_ObjectTrackingParameters |
| Structure containing a set of parameters for the object tracking module. More... | |
| struct | SL_Resolution |
| Structure containing the width and height of an image. More... | |
| struct | SL_InitParameters |
| Structure containing the options used to initialize a camera. More... | |
| struct | SL_RuntimeParameters |
| Structure containing parameters that defines the behavior of sl_grab(). More... | |
| struct | SL_DeviceProperties |
| Structure containing information about the properties of a camera. More... | |
| struct | SL_CameraParameters |
| Structure containing the intrinsic parameters of a camera. More... | |
| struct | SL_CalibrationParameters |
| Structure containing intrinsic and extrinsic parameters of the camera (translation and rotation). More... | |
| struct | SL_SensorParameters |
| Structure containing information about a single sensor available in the current device. More... | |
| struct | SL_CameraConfiguration |
| Structure containing information about the camera sensor. More... | |
| struct | SL_SensorsConfiguration |
| Structure containing information about all the sensors available in the current device. More... | |
| struct | SL_CameraInformation |
| Structure containing information of a single camera (serial number, model, input type, etc.) More... | |
| struct | SL_PositionalTrackingParameters |
| Structure containing a set of parameters for the positional tracking module initialization. More... | |
| struct | SL_Landmark |
| Represents a 3d landmark. More... | |
| struct | SL_Landmark2D |
| Represents a 2d landmark. More... | |
| struct | SL_RegionOfInterestParameters |
| Structure containing a set of parameters for the region of interest. More... | |
| struct | SL_PlaneDetectionParameters |
| Structure containing a set of parameters for the plane detection functionality. More... | |
| struct | SL_RecordingStatus |
| Structure containing information about the status of the recording. More... | |
| struct | SL_RecordingParameters |
| Structure containing the options used to record. More... | |
| struct | SL_SVOData |
| Structure containing data that can be stored in and retrieved from SVOs. That information will be ingested with sl_ingest_data_into_svo and retrieved with sl_retrieve_svo_data. More... | |
| struct | SL_StreamingParameters |
| Structure containing the options used to stream with the ZED SDK. More... | |
| struct | SL_StreamingProperties |
| Structure containing information about the properties of a streaming device. More... | |
| struct | SL_SpatialMappingParameters |
| Structure containing a set of parameters for the spatial mapping module. More... | |
| struct | SL_BatchParameters |
| Structure containing a set of parameters for batch object detection. More... | |
| struct | SL_AI_Model_status |
| Structure containing AI model status. More... | |
| struct | SL_ObjectDetectionParameters |
| Structure containing a set of parameters for the object detection module. More... | |
| struct | SL_ObjectDetectionRuntimeParameters |
| Structure containing a set of runtime parameters for the object detection module. More... | |
| struct | SL_CustomObjectDetectionProperties |
| Structure containing a set of runtime properties of a certain class ID for the object detection module using a custom model. More... | |
| struct | SL_CustomObjectDetectionRuntimeParameters |
| Structure containing a set of runtime parameters for the object detection module using your own model ran by the SDK. More... | |
| struct | SL_BodyTrackingParameters |
| Structure containing a set of parameters for the body tracking module. More... | |
| struct | SL_BodyTrackingRuntimeParameters |
| Structure containing a set of runtime parameters for the body tracking module. More... | |
| struct | SL_ObjectData |
| Structure containing data of a detected object such as its bounding_box, label, id and its 3D position. More... | |
| struct | SL_CustomBoxObjectData |
| Structure that store externally detected objects. More... | |
| struct | SL_CustomMaskObjectData |
| struct | SL_Objects |
| Structure containing the results of the object detection module. More... | |
| struct | SL_BodyData |
| Structure containing data of a detected body/person such as its bounding_box, id and its 3D position. More... | |
| struct | SL_Bodies |
| Structure containing the results of the body tracking module. More... | |
| struct | SL_ObjectsBatch |
| Structure containing batched data of a detected objects from the object detection module. More... | |
| struct | SL_Rect |
| Structure defining a 2D rectangle with top-left corner coordinates and width/height in pixels. More... | |
| struct | SL_InputType |
| Structure defining the input type used in the ZED SDK. More... | |
| struct | SL_HealthStatus |
| struct | SL_FusedPositionalTrackingStatus |
| Class containing the overall position fusion status. More... | |
| struct | SL_CommunicationParameters |
| struct | SL_FusionConfiguration |
| Useful struct to store the Fusion configuration, can be read from /write to a JSON file. More... | |
| struct | SL_SynchronizationParameter |
| Configuration parameters for data synchronization. More... | |
| struct | SL_InitFusionParameters |
| Holds the options used to initialize the Fusion object. More... | |
| struct | SL_BodyTrackingFusionParameters |
| Holds the options used to initialize the body tracking module of the Fusion. More... | |
| struct | SL_BodyTrackingFusionRuntimeParameters |
| Holds the options used to change the behavior of the body tracking module at runtime. More... | |
| struct | SL_CameraIdentifier |
| Used to identify a specific camera in the Fusion API. More... | |
| struct | SL_CameraMetrics |
| Holds the metrics of a sender in the fusion process. More... | |
| struct | SL_FusionMetrics |
| Holds the metrics of the fusion process. More... | |
| struct | SL_GNSSData |
| Structure containing GNSS data to be used for positional tracking as prior. More... | |
| struct | SL_LatLng |
| Represents a world position in LatLng format. More... | |
| struct | SL_GeoPose |
| Holds Geo reference position. More... | |
| struct | SL_ECEF |
| Represents a world position in ECEF format. More... | |
| struct | SL_UTM |
| Represents a world position in UTM format. More... | |
| struct | SL_ENU |
| Represents a world position in ENU format. More... | |
| struct | SL_GNSSCalibrationParameters |
| Holds the options used for calibrating GNSS / VIO. More... | |
| struct | SL_PositionalTrackingFusionParameters |
| Holds the options used for initializing the positional tracking fusion module. More... | |
Macros | |
| #define | MAX_FUSED_CAMERAS 20 |
| #define | WITH_OBJECT_DETECTION 1 |
| #define | MAX_CAMERA_PLUGIN 4 |
| #define | MAX_SUBMESH 1000 |
| #define | MAX_NUMBER_OBJECT 75 |
| #define | MAX_TRAJECTORY_SIZE 200 |
Enumerations | |
| enum | UNITY_PLAN_TYPE |
| enum | SL_HEADING_STATE |
| Lists the different states of the magnetic heading. More... | |
| enum | SL_ERROR_CODE |
| Lists error codes in the ZED SDK. More... | |
| enum | SL_RESOLUTION |
| Lists available resolutions. More... | |
| enum | SL_UNIT |
| Lists available units for measures. More... | |
| enum | SL_COORDINATE_SYSTEM |
| Lists available coordinates systems for positional tracking and 3D measures. More... | |
| enum | SL_CAMERA_STATE |
| Lists possible camera states. More... | |
| enum | SL_MODEL |
| Lists ZED camera model. More... | |
| enum | SL_MEM |
| Lists available memory type. More... | |
| enum | SL_BUS_TYPE |
| Lists available LIVE input type in the ZED SDK. More... | |
| enum | SL_SENSOR_TYPE |
| Lists available sensor types. More... | |
| enum | SL_SENSORS_UNIT |
| Lists available measurement units of onboard sensors. More... | |
| enum | SL_SIDE |
| Lists possible sides on which to get data from. More... | |
| enum | SL_INPUT_TYPE |
| Lists available input types in the ZED SDK. More... | |
| enum | SL_REFERENCE_FRAME |
| Lists possible types of position matrix used to store camera path and pose. More... | |
| enum | SL_TIME_REFERENCE |
| Lists possible time references for timestamps or data. More... | |
| enum | SL_STREAMING_CODEC |
| Lists the different encoding types for image streaming. More... | |
| enum | SL_VIDEO_SETTINGS |
| Lists available camera settings for the camera (contrast, hue, saturation, gain, ...). More... | |
| enum | SL_SVO_ENCODING_PRESET |
| Lists the available encoding presets for SVO recording. More... | |
| enum | SL_TIMESTAMP_CLOCK |
| Selects the clock source used for all timestamps produced by the ZED SDK. More... | |
| enum | SL_VOXELIZATION_MODE |
| Controls how voxel size adapts with depth in sl_retrieve_voxel_measure. More... | |
| enum | SL_MEASURE |
| Lists retrievable measures. More... | |
| enum | SL_VIEW |
| Lists available views. More... | |
| enum | SL_OBJECT_TRACKING_STATE |
| Lists the different states of object tracking. More... | |
| enum | SL_POSITIONAL_TRACKING_STATE |
| Lists the different states of positional tracking. More... | |
| enum | SL_ODOMETRY_STATUS |
| Report the status of current odom tracking. More... | |
| enum | SL_SPATIAL_MEMORY_STATUS |
| Report the status of current map tracking. More... | |
| enum | SL_POSITIONAL_TRACKING_MODE |
| Lists the mode of positional tracking that can be used. More... | |
| enum | SL_POSITIONAL_TRACKING_FUSION_STATUS |
| Report the status of the positional tracking fusion. | |
| enum | SL_REGION_OF_INTEREST_AUTO_DETECTION_STATE |
| Lists the different states of region of interest auto detection. More... | |
| enum | SL_AREA_EXPORTING_STATE |
| Lists the different states of spatial memory area export. More... | |
| enum | SL_SPATIAL_MAPPING_STATE |
| Lists the different states of spatial mapping. More... | |
| enum | SL_SPATIAL_MAP_TYPE |
| Lists the types of spatial maps that can be created. More... | |
| enum | SL_MESH_FILTER |
| Lists available mesh filtering intensities. More... | |
| enum | SL_MESH_FILE_FORMAT |
| Lists available mesh file formats. More... | |
| enum | SL_DEPTH_MODE |
| Lists available depth computation modes. More... | |
| enum | SL_FLIP_MODE |
| Lists possible flip modes of the camera. More... | |
| enum | SL_COPY_TYPE |
| Lists available copy operation on matrix. More... | |
| enum | SL_SVO_COMPRESSION_MODE |
| Lists available compression modes for SVO recording. More... | |
| enum | SL_MAT_TYPE |
| Lists available matrix formats. More... | |
| enum | SL_OBJECT_SUBCLASS |
| List available object subclasses. More... | |
| enum | SL_OBJECT_ACTION_STATE |
| Lists the different states of an object's actions. More... | |
| enum | SL_OBJECT_DETECTION_MODEL |
| Lists available models for the object detection module. More... | |
| enum | SL_BODY_TRACKING_MODEL |
| Lists available models for the body tracking module. More... | |
| enum | SL_AI_MODELS |
| Lists available AI models. More... | |
| enum | SL_OBJECT_FILTERING_MODE |
| Lists supported bounding box preprocessing. More... | |
| enum | SL_OBJECT_ACCELERATION_PRESET |
| Lists supported bounding box preprocessing. More... | |
| enum | SL_INFERENCE_PRECISION |
| Report the actual inference precision used. | |
| enum | SL_BODY_FORMAT |
| Lists supported skeleton body models. More... | |
| enum | SL_BODY_KEYPOINTS_SELECTION |
| Lists supported models for skeleton keypoints selection. More... | |
| enum | SL_BODY_18_PARTS |
| Semantic of human body parts and order of SL_BodyData::keypoint for SL_BODY_FORMAT_BODY_18. More... | |
| enum | SL_BODY_34_PARTS |
| Semantic of human body parts and order of SL_BodyData::keypoint for SL_BODY_FORMAT_BODY_34. More... | |
| enum | SL_BODY_38_PARTS |
| Semantic of human body parts and order of SL_BodyData::keypoint for SL_BODY_FORMAT_BODY_38. More... | |
| enum | SL_MODULE |
| enum | SL_POSITION_TYPE |
| Lists the types of possible position outputs. More... | |
| enum | SL_OBJECT_CLASS |
| Lists available object classes. More... | |
| enum | SL_FUSION_ERROR_CODE |
| Lists the types of error that can be raised by the Fusion. More... | |
| enum | SL_SENDER_ERROR_CODE |
| Lists the types of error that can be raised during the Fusion by senders. More... | |
| enum | SL_COMM_TYPE |
| Lists the different types of communications available for Fusion module. More... | |
| enum | SL_GNSS_STATUS |
| Class representing the fix quality of GNSS signal. More... | |
| enum | SL_GNSS_MODE |
| enum | SL_GNSS_FUSION_STATUS |
| Class containing the current GNSS fusion status. More... | |
| enum | SL_FUSION_REFERENCE_FRAME |
| Enum to define the reference frame of the fusion SDK. More... | |
Variables | |
| const int | SL_VIDEO_SETTINGS_VALUE_AUTO = -1 |
| enum SL_HEADING_STATE |
Lists the different states of the magnetic heading.
| enum SL_ERROR_CODE |
Lists error codes in the ZED SDK.
| Enumerator | |
|---|---|
| SL_ERROR_CODE_SENSOR_CONFIGURATION_CHANGED | The sensor's configuration (mode, multicast, etc.) was changed externally while streaming. If auto_recovery_on_config_change is enabled, the SDK will automatically reconnect. This warning code is returned once after successful recovery. |
| SL_ERROR_CODE_POTENTIAL_CALIBRATION_ISSUE | The camera has a potential calibration issue |
| SL_ERROR_CODE_CONFIGURATION_FALLBACK | The operation could not proceed with the target configuration but did success with a fallback. |
| SL_ERROR_CODE_SENSORS_DATA_REQUIRED | The input data does not contains the high frequency sensors data, this is usually because it requires newer SVO/Streaming. In order to work this modules needs inertial data present in it input. |
| SL_ERROR_CODE_CORRUPTED_FRAME | The image is corrupted with invalid colors (green/purple images). This indicates a serious hardware or driver issue. |
| SL_ERROR_CODE_CAMERA_REBOOTING | The camera is currently rebooting. |
| SL_ERROR_CODE_SUCCESS | Standard code for successful behavior. |
| SL_ERROR_CODE_FAILURE | Standard code for unsuccessful behavior. |
| SL_ERROR_CODE_NO_GPU_COMPATIBLE | No GPU found or CUDA capability of the device is not supported. |
| SL_ERROR_CODE_NOT_ENOUGH_GPU_MEMORY | Not enough GPU memory for this depth mode. Try a different mode (such as SL_DEPTH_MODE_PERFORMANCE), or increase the minimum depth value (see SL_InitParameters.depth_minimum_distance). |
| SL_ERROR_CODE_CAMERA_NOT_DETECTED | No camera was detected. |
| SL_ERROR_CODE_SENSORS_NOT_INITIALIZED | The MCU that controls the sensors module has an invalid serial number. You can try to recover it by launching the ZED Diagnostic tool from the command line with the option |
| SL_ERROR_CODE_SENSORS_NOT_AVAILABLE | A camera with sensor is detected but the sensors (IMU, barometer, ...) cannot be opened. Only the SL_MODEL_ZED does not has sensors. Unplug/replug is required. |
| SL_ERROR_CODE_INVALID_RESOLUTION | In case of invalid resolution parameter, such as an upsize beyond the original image size in sl_retrieve_image. |
| SL_ERROR_CODE_LOW_USB_BANDWIDTH | Insufficient bandwidth for the correct use of the camera. This issue can occur when you use multiple cameras or a USB 2.0 port. |
| SL_ERROR_CODE_CALIBRATION_FILE_NOT_AVAILABLE | The calibration file of the camera is not found on the host machine. Use ZED Explorer or ZED Calibration to download the factory calibration file. |
| SL_ERROR_CODE_INVALID_CALIBRATION_FILE | The calibration file is not valid. Try to download the factory calibration file or recalibrate your camera using ZED Calibration. |
| SL_ERROR_CODE_INVALID_SVO_FILE | The provided SVO file is not valid. |
| SL_ERROR_CODE_SVO_RECORDING_ERROR | An error occurred while trying to record an SVO (not enough free storage, invalid file, ...). |
| SL_ERROR_CODE_SVO_UNSUPPORTED_COMPRESSION | An SVO related error, occurs when NVIDIA based compression cannot be loaded. |
| SL_ERROR_CODE_END_OF_SVOFILE_REACHED | SVO end of file has been reached. |
| SL_ERROR_CODE_INVALID_COORDINATE_SYSTEM | The requested coordinate system is not available. |
| SL_ERROR_CODE_INVALID_FIRMWARE | The firmware of the camera is out of date. Update to the latest version. |
| SL_ERROR_CODE_INVALID_FUNCTION_PARAMETERS | Invalid parameters have been given for the function. |
| SL_ERROR_CODE_CUDA_ERROR | A CUDA error has been detected in the process, in sl_grab() or sl_retrieve_xxx() only. Activate verbose in sl_open_camera() for more info. |
| SL_ERROR_CODE_CAMERA_NOT_INITIALIZED | The ZED SDK is not initialized. Probably a missing call to sl_open_camera(). |
| SL_ERROR_CODE_NVIDIA_DRIVER_OUT_OF_DATE | Your NVIDIA driver is too old and not compatible with your current CUDA version. |
| SL_ERROR_CODE_INVALID_FUNCTION_CALL | The call of the function is not valid in the current context. Could be a missing call of sl_open_camera(). |
| SL_ERROR_CODE_CORRUPTED_SDK_INSTALLATION | The ZED SDK was not able to load its dependencies or some assets are missing. Reinstall the ZED SDK or check for missing dependencies (cuDNN, TensorRT). |
| SL_ERROR_CODE_INCOMPATIBLE_SDK_VERSION | The installed ZED SDK is incompatible with the one used to compile the program. |
| SL_ERROR_CODE_INVALID_AREA_FILE | The given area file does not exist. Check the path. |
| SL_ERROR_CODE_INCOMPATIBLE_AREA_FILE | The area file does not contain enough data to be used or the SL_DEPTH_MODE used during the creation of the area file is different from the one currently set. |
| SL_ERROR_CODE_CAMERA_FAILED_TO_SETUP | Failed to open the camera at the proper resolution. Try another resolution or make sure that the UVC driver is properly installed. |
| SL_ERROR_CODE_CAMERA_DETECTION_ISSUE | Your camera can not be opened. Try replugging it to another port or flipping the USB-C connector (if there is one). |
| SL_ERROR_CODE_CANNOT_START_CAMERA_STREAM | Cannot start the camera stream. Make sure your camera is not already used by another process or blocked by firewall or antivirus. |
| SL_ERROR_CODE_NO_GPU_DETECTED | No GPU found. CUDA is unable to list it. Can be a driver/reboot issue. |
| SL_ERROR_CODE_PLANE_NOT_FOUND | Plane not found. Either no plane is detected in the scene, at the location or corresponding to the floor, or the floor plane doesn't match the prior given. |
| SL_ERROR_CODE_MODULE_NOT_COMPATIBLE_WITH_CAMERA | The module you try to use is not compatible with your camera SL_MODEL.
|
| SL_ERROR_CODE_MOTION_SENSORS_REQUIRED | The module needs the sensors to be enabled (see SL_InitParameters.sensors_required). |
| SL_ERROR_CODE_MODULE_NOT_COMPATIBLE_WITH_CUDA_VERSION | The module needs a newer version of CUDA. |
| SL_ERROR_CODE_DRIVER_FAILURE | The drivers initialization has failed. When using gmsl cameras, try restarting with sudo systemctl restart zed_x_daemon.service |
| SL_ERROR_CODE_CAMERA_EXCEEDS_BANDWIDTH | The camera configuration exceeds available PHY CSI bandwidth (GMSL). Reduce resolution/FPS or adjust hardware configuration. |
| enum SL_RESOLUTION |
Lists available resolutions.
| Enumerator | |
|---|---|
| SL_RESOLUTION_HD4K | 3856x2180 for imx678 mono |
| SL_RESOLUTION_QHDPLUS | 3800x1800 |
| SL_RESOLUTION_HD2K | 2208*1242 (x2) |
| SL_RESOLUTION_HD1536 | 1920*1536 (x2) |
| SL_RESOLUTION_HD1080 | 1920*1080 (x2) |
| SL_RESOLUTION_HD1200 | 1920*1200 (x2) |
| SL_RESOLUTION_HD720 | 1280*720 (x2) |
| SL_RESOLUTION_SVGA | 960*600 (x2) |
| SL_RESOLUTION_VGA | 672*376 (x2) |
| SL_RESOLUTION_XVGA | 960x768 (x2) |
| SL_RESOLUTION_TXGA | 640x512 (x2) |
| SL_RESOLUTION_AUTO | Select the resolution compatible with the camera:
|
| enum SL_UNIT |
| enum SL_COORDINATE_SYSTEM |
Lists available coordinates systems for positional tracking and 3D measures.
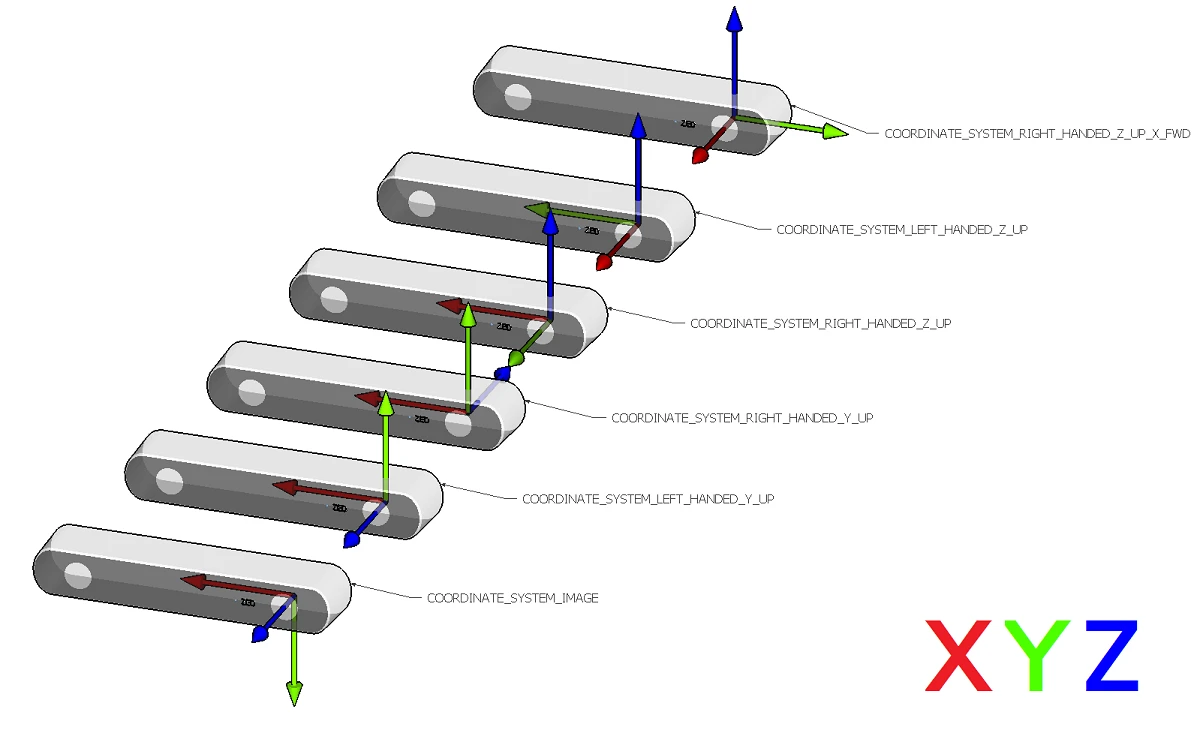
| Enumerator | |
|---|---|
| SL_COORDINATE_SYSTEM_IMAGE | Standard coordinates system in computer vision. |
| SL_COORDINATE_SYSTEM_LEFT_HANDED_Y_UP | Left-handed with Y up and Z forward. |
| SL_COORDINATE_SYSTEM_RIGHT_HANDED_Y_UP | Right-handed with Y pointing up and Z backward. |
| SL_COORDINATE_SYSTEM_RIGHT_HANDED_Z_UP | Right-handed with Z pointing up and Y forward. |
| SL_COORDINATE_SYSTEM_LEFT_HANDED_Z_UP | Left-handed with Z axis pointing up and X forward. |
| SL_COORDINATE_SYSTEM_RIGHT_HANDED_Z_UP_X_FWD | Right-handed with Z pointing up and X forward. |
| enum SL_CAMERA_STATE |
| enum SL_MODEL |
Lists ZED camera model.
| enum SL_MEM |
| enum SL_BUS_TYPE |
| enum SL_SENSOR_TYPE |
Lists available sensor types.
| enum SL_SENSORS_UNIT |
Lists available measurement units of onboard sensors.
| enum SL_SIDE |
| enum SL_INPUT_TYPE |
Lists available input types in the ZED SDK.
| Enumerator | |
|---|---|
| SL_INPUT_TYPE_USB | USB input mode |
| SL_INPUT_TYPE_SVO | SVO file input mode |
| SL_INPUT_TYPE_STREAM | STREAM input mode (requires to use sl_enable_streaming() / sl_disable_streaming() on the "sender" side) |
| SL_INPUT_TYPE_GMSL | GMSL input mode (only on NVIDIA Jetson) |
| enum SL_REFERENCE_FRAME |
Lists possible types of position matrix used to store camera path and pose.
| Enumerator | |
|---|---|
| SL_REFERENCE_FRAME_WORLD | SL_PoseData will contain the motion with reference to the world frame (previously called SL_PATH). |
| SL_REFERENCE_FRAME_CAMERA | SL_PoseData will contain the motion with reference to the previous camera frame (previously called SL_POSE) |
| enum SL_TIME_REFERENCE |
| enum SL_STREAMING_CODEC |
| enum SL_VIDEO_SETTINGS |
Lists available camera settings for the camera (contrast, hue, saturation, gain, ...).
| Enumerator | |
|---|---|
| SL_VIDEO_SETTINGS_BRIGHTNESS | Brightness control
|
| SL_VIDEO_SETTINGS_CONTRAST | Contrast control
|
| SL_VIDEO_SETTINGS_HUE | Hue control
|
| SL_VIDEO_SETTINGS_SATURATION | Saturation control |
| SL_VIDEO_SETTINGS_SHARPNESS | Digital sharpening control |
| SL_VIDEO_SETTINGS_GAMMA | ISP gamma control |
| SL_VIDEO_SETTINGS_GAIN | Gain control
|
| SL_VIDEO_SETTINGS_EXPOSURE | Exposure control
|
| SL_VIDEO_SETTINGS_AEC_AGC | Defines if the SL_VIDEO_SETTINGS_GAIN and SL_VIDEO_SETTINGS_EXPOSURE are in automatic mode or not. |
| SL_VIDEO_SETTINGS_AEC_AGC_ROI | Defines the region of interest for automatic exposure/gain computation. |
| SL_VIDEO_SETTINGS_WHITEBALANCE_TEMPERATURE | Color temperature control
|
| SL_VIDEO_SETTINGS_WHITEBALANCE_AUTO | Defines if the white balance is in automatic mode or not. |
| SL_VIDEO_SETTINGS_LED_STATUS | Status of the front LED of the camera.
|
| SL_VIDEO_SETTINGS_EXPOSURE_TIME | Real exposure time control in microseconds.
|
| SL_VIDEO_SETTINGS_ANALOG_GAIN | Real analog gain (sensor) control in mDB.
|
| SL_VIDEO_SETTINGS_DIGITAL_GAIN | Real digital gain (ISP) as a factor.
|
| SL_VIDEO_SETTINGS_AUTO_EXPOSURE_TIME_RANGE | Range of exposure auto control in microseconds.
|
| SL_VIDEO_SETTINGS_AUTO_ANALOG_GAIN_RANGE | Range of sensor gain in automatic control.
|
| SL_VIDEO_SETTINGS_AUTO_DIGITAL_GAIN_RANGE | Range of digital ISP gain in automatic control.
|
| SL_VIDEO_SETTINGS_EXPOSURE_COMPENSATION | Exposure-target compensation made after auto exposure.
|
| SL_VIDEO_SETTINGS_DENOISING | Level of denoising applied on both left and right images.
|
| SL_VIDEO_SETTINGS_SCENE_ILLUMINANCE | Level of illuminance of the scene.
|
| SL_VIDEO_SETTINGS_AE_ANTIBANDING | AE anti-banding mode.
|
Lists the available encoding presets for SVO recording.
| enum SL_TIMESTAMP_CLOCK |
Selects the clock source used for all timestamps produced by the ZED SDK.
| enum SL_VOXELIZATION_MODE |
Controls how voxel size adapts with depth in sl_retrieve_voxel_measure.
| enum SL_MEASURE |
Lists retrievable measures.
| Enumerator | |
|---|---|
| SL_MEASURE_DISPARITY | Disparity map. Each pixel contains 1 float. |
| SL_MEASURE_DEPTH | Depth map in sl::UNIT defined in SL_InitParameters::coordinate_unit. Each pixel contains 1 float. |
| SL_MEASURE_CONFIDENCE | Certainty/confidence of the depth map. Each pixel contains 1 float. |
| SL_MEASURE_XYZ | Point cloud. Each pixel contains 4 float (X, Y, Z, not used). |
| SL_MEASURE_XYZRGBA | Colored point cloud. Each pixel contains 4 float (X, Y, Z, color). |
| SL_MEASURE_XYZBGRA | Colored point cloud. Each pixel contains 4 float (X, Y, Z, color). |
| SL_MEASURE_XYZARGB | Colored point cloud. Each pixel contains 4 float (X, Y, Z, color). |
| SL_MEASURE_XYZABGR | Colored point cloud. Each pixel contains 4 float (X, Y, Z, color). |
| SL_MEASURE_NORMALS | Normal vectors map. Each pixel contains 4 float (X, Y, Z, 0). |
| SL_MEASURE_DISPARITY_RIGHT | Disparity map for right sensor. Each pixel contains 1 float. |
| SL_MEASURE_DEPTH_RIGHT | Depth map for right sensor. Each pixel contains 1 float. |
| SL_MEASURE_XYZ_RIGHT | Point cloud for right sensor. Each pixel contains 4 float (X, Y, Z, not used). |
| SL_MEASURE_XYZRGBA_RIGHT | Colored point cloud for right sensor. Each pixel contains 4 float (X, Y, Z, color). |
| SL_MEASURE_XYZBGRA_RIGHT | Colored point cloud for right sensor. Each pixel contains 4 float (X, Y, Z, color). |
| SL_MEASURE_XYZARGB_RIGHT | Colored point cloud for right sensor. Each pixel contains 4 float (X, Y, Z, color). |
| SL_MEASURE_XYZABGR_RIGHT | Colored point cloud for right sensor. Each pixel contains 4 float (X, Y, Z, color). |
| SL_MEASURE_NORMALS_RIGHT | Normal vectors map for right view. Each pixel contains 4 float (X, Y, Z, 0). |
| SL_MEASURE_DEPTH_U16_MM | Depth map in millimeter whatever the sl::UNIT defined in SL_InitParameters::coordinate_unit. |
| SL_MEASURE_DEPTH_U16_MM_RIGHT | Depth map in millimeter for right sensor. Each pixel contains 1 unsigned short. |
| enum SL_VIEW |
Lists available views.
| Enumerator | |
|---|---|
| SL_VIEW_LEFT | Left BGRA image. Each pixel contains 4 unsigned char (B, G, R, A). |
| SL_VIEW_RIGHT | Right BGRA image. Each pixel contains 4 unsigned char (B, G, R, A). |
| SL_VIEW_LEFT_GRAY | Left gray image. Each pixel contains 1 unsigned char. |
| SL_VIEW_RIGHT_GRAY | Right gray image. Each pixel contains 1 unsigned char. |
| SL_VIEW_LEFT_NV12_UNRECTIFIED | Left NV12 unrectified image. |
| SL_VIEW_RIGHT_NV12_UNRECTIFIED | Right NV12 unrectified image. |
| SL_VIEW_LEFT_UNRECTIFIED | Left BGRA unrectified image. Each pixel contains 4 unsigned char (B, G, R, A). |
| SL_VIEW_RIGHT_UNRECTIFIED | Right BGRA unrectified image. Each pixel contains 4 unsigned char (B, G, R, A). |
| SL_VIEW_LEFT_UNRECTIFIED_GRAY | Left gray unrectified image. Each pixel contains 1 unsigned char. |
| SL_VIEW_RIGHT_UNRECTIFIED_GRAY | Right gray unrectified image. Each pixel contains 1 unsigned char. |
| SL_VIEW_SIDE_BY_SIDE | Left and right image (the image width is therefore doubled). Each pixel contains 4 unsigned char (B, G, R, A). |
| SL_VIEW_DEPTH | Color rendering of the depth. Each pixel contains 4 unsigned char (B, G, R, A).
|
| SL_VIEW_CONFIDENCE | Color rendering of the depth confidence. Each pixel contains 4 unsigned char (B, G, R, A).
|
| SL_VIEW_NORMALS | Color rendering of the normals. Each pixel contains 4 unsigned char (B, G, R, A).
|
| SL_VIEW_DEPTH_RIGHT | Color rendering of the right depth mapped on right sensor. Each pixel contains 4 unsigned char (B, G, R, A).
|
| SL_VIEW_NORMALS_RIGHT | Color rendering of the normals mapped on right sensor. Each pixel contains 4 unsigned char (B, G, R, A).
|
| SL_VIEW_LEFT_BGRA | Alias of SL_VIEW_LEFT. |
| SL_VIEW_LEFT_BGR | Left image in BGR pixel format: Type: SL_MAT_TYPE_U8_C3 |
| SL_VIEW_RIGHT_BGRA | Alias of SL_VIEW_RIGHT. |
| SL_VIEW_RIGHT_BGR | Right image in BGR pixel format: Type: SL_MAT_TYPE_U8_C3 |
| SL_VIEW_LEFT_UNRECTIFIED_BGRA | Alias of SL_VIEW_LEFT_UNRECTIFIED. |
| SL_VIEW_LEFT_UNRECTIFIED_BGR | Left unrectified image in BGR pixel format: Type: SL_MAT_TYPE_U8_C3 |
| SL_VIEW_RIGHT_UNRECTIFIED_BGRA | Alias of SL_VIEW_RIGHT_UNRECTIFIED. |
| SL_VIEW_RIGHT_UNRECTIFIED_BGR | Right unrectified image in BGR pixel format: Type: SL_MAT_TYPE_U8_C3 |
| SL_VIEW_SIDE_BY_SIDE_BGRA | Alias of SL_VIEW_SIDE_BY_SIDE. |
| SL_VIEW_SIDE_BY_SIDE_BGR | Side by side image in BGR pixel format: Type: SL_MAT_TYPE_U8_C3 |
| SL_VIEW_SIDE_BY_SIDE_GRAY | Side by side image in gray scale: Type: SL_MAT_TYPE_U8_C1 |
| SL_VIEW_SIDE_BY_SIDE_UNRECTIFIED_BGRA | Alias of sl::VIEW::SIDE_BY_SIDE_UNRECTIFIED. |
| SL_VIEW_SIDE_BY_SIDE_UNRECTIFIED_BGR | Side by side unrectified image in BGR pixel format: Type: sl::MAT_TYPE::U8_C3 |
| SL_VIEW_SIDE_BY_SIDE_UNRECTIFIED_GRAY | Side by side unrectified image in gray scale: Type: sl::MAT_TYPE::U8_C1 |
| SL_VIEW_DEPTH_BGRA | Alias of SL_VIEW_DEPTH. |
| SL_VIEW_DEPTH_BGR | Depth image in BGR pixel format: Type: SL_MAT_TYPE_U8_C3 |
| SL_VIEW_DEPTH_GRAY | Depth image in gray scale: Type: SL_MAT_TYPE_U8_C1 |
| SL_VIEW_CONFIDENCE_BGRA | Alias of SL_VIEW_CONFIDENCE. |
| SL_VIEW_CONFIDENCE_BGR | Confidence image in BGR pixel format: Type: SL_MAT_TYPE_U8_C3 |
| SL_VIEW_CONFIDENCE_GRAY | Confidence image in gray scale: Type: SL_MAT_TYPE_U8_C1 |
| SL_VIEW_NORMALS_BGRA | Alias of SL_VIEW_NORMALS. |
| SL_VIEW_NORMALS_BGR | Normal image in BGR pixel format: Type: SL_MAT_TYPE_U8_C3 |
| SL_VIEW_NORMALS_GRAY | Normal image in gray scale: Type: SL_MAT_TYPE_U8_C1 |
| SL_VIEW_DEPTH_RIGHT_BGRA | Alias of SL_VIEW_DEPTH_RIGHT. |
| SL_VIEW_DEPTH_RIGHT_BGR | Depth right image in BGR pixel format: Type: SL_MAT_TYPE_U8_C3 |
| SL_VIEW_DEPTH_RIGHT_GRAY | Depth right image in gray scale: Type: SL_MAT_TYPE_U8_C1 |
| SL_VIEW_NORMALS_RIGHT_BGRA | Alias of SL_VIEW_NORMALS_RIGHT. |
| SL_VIEW_NORMALS_RIGHT_BGR | Normal right image in BGR pixel format: Type: SL_MAT_TYPE_U8_C3 |
| SL_VIEW_NORMALS_RIGHT_GRAY | Normal right image in gray scale: Type: SL_MAT_TYPE_U8_C1 |
Lists the different states of object tracking.
| Enumerator | |
|---|---|
| SL_OBJECT_TRACKING_STATE_OFF | The tracking is not yet initialized. |
| SL_OBJECT_TRACKING_STATE_OK | The object is tracked. |
| SL_OBJECT_TRACKING_STATE_SEARCHING | The object could not be detected in the image and is potentially occluded. |
| SL_OBJECT_TRACKING_STATE_TERMINATE | This is the last searching state of the track. |
Lists the different states of positional tracking.
| Enumerator | |
|---|---|
| SL_POSITIONAL_TRACKING_STATE_SEARCHING | \warn DEPRECATED: This state is no longer in use. |
| SL_POSITIONAL_TRACKING_STATE_OK | The positional tracking is working normally. |
| SL_POSITIONAL_TRACKING_STATE_OFF | The positional tracking is not enabled. |
| SL_POSITIONAL_TRACKING_STATE_FPS_TOO_LOW | The effective FPS is too low to give proper results for motion tracking. |
| SL_POSITIONAL_TRACKING_STATE_SEARCHING_FLOOR_PLANE | The camera is searching for the floor plane to locate itself with respect to it. |
| SL_POSITIONAL_TRACKING_STATE_UNAVAILABLE | The tracking module was unable to perform tracking from the previous frame to the current frame. |
| enum SL_ODOMETRY_STATUS |
Report the status of current map tracking.
| Enumerator | |
|---|---|
| SL_MAP_TRACKING_STATUS_OK |
|
| SL_MAP_TRACKING_STATUS_LOOP_CLOSED | Found a loop closure, relocalized within the area map or corrected after a sudden localization loss. |
| SL_MAP_TRACKING_STATUS_SEARCHING |
|
| SL_MAP_TRACKING_STATUS_OFF | Spatial memory is disabled. |
| SL_MAP_TRACKING_STATUS_INITIALIZING | Camera has not yet acquired enough memory or found its first loop closure. Keep moving the camera. |
| SL_MAP_TRACKING_STATUS_KNOWN_MAP | Camera is localized within the loaded area map. |
| SL_MAP_TRACKING_STATUS_MAP_UPDATE | Camera is mapping or getting out of area map bounds. |
| SL_MAP_TRACKING_STATUS_LOST | Localization cannot operate anymore (camera obstructed or sudden jumps). |
| SL_MAP_TRACKING_STATUS_NOT_ENOUGH_MEMORY_FOR_TRACKING | Not enough memory to continue tracking. |
Lists the mode of positional tracking that can be used.
Lists the different states of region of interest auto detection.
Lists the different states of spatial memory area export.
Lists the different states of spatial mapping.
| Enumerator | |
|---|---|
| SL_SPATIAL_MAPPING_STATE_INITIALIZING | The spatial mapping is initializing. |
| SL_SPATIAL_MAPPING_STATE_OK | The depth and tracking data were correctly integrated in the mapping algorithm. |
| SL_SPATIAL_MAPPING_STATE_NOT_ENOUGH_MEMORY | The maximum memory dedicated to the scanning has been reached. |
| SL_SPATIAL_MAPPING_STATE_NOT_ENABLED | sl_enable_spatial_mapping() wasn't called or the scanning was stopped and not relaunched. |
| SL_SPATIAL_MAPPING_STATE_FPS_TOO_LOW | The effective FPS is too low to give proper results for spatial mapping. |
| enum SL_SPATIAL_MAP_TYPE |
Lists the types of spatial maps that can be created.
| enum SL_MESH_FILTER |
| enum SL_MESH_FILE_FORMAT |
| enum SL_DEPTH_MODE |
Lists available depth computation modes.
| enum SL_FLIP_MODE |
Lists possible flip modes of the camera.
| enum SL_COPY_TYPE |
Lists available compression modes for SVO recording.
| enum SL_MAT_TYPE |
Lists available matrix formats.
| enum SL_OBJECT_SUBCLASS |
List available object subclasses.
Given as hint, when using object tracking an object can change of SL_OBJECT_SUBCLASS while keeping the same SL_OBJECT_CLASS (i.e.: frame n: SL_OBJECT_SUBCLASS_MOTORBIKE, frame n+1: SL_OBJECT_SUBCLASS_BICYCLE).
Lists available models for the object detection module.
Lists available models for the body tracking module.
| enum SL_AI_MODELS |
Lists available AI models.
| Enumerator | |
|---|---|
| SL_AI_MODELS_MULTI_CLASS_DETECTION | |
| SL_AI_MODELS_MULTI_CLASS_MEDIUM_DETECTION | |
| SL_AI_MODELS_MULTI_CLASS_ACCURATE_DETECTION | Related to SL_OBJECT_DETECTION_MODEL_MULTI_CLASS_BOX_ACCURATE |
| SL_AI_MODELS_HUMAN_BODY_FAST_DETECTION | Related to SL_BODY_TRACKING_MODEL_HUMAN_BODY_FAST |
| SL_AI_MODELS_HUMAN_BODY_MEDIUM_DETECTION | Related to SL_BODY_TRACKING_MODEL_HUMAN_BODY_MEDIUM |
| SL_AI_MODELS_HUMAN_BODY_ACCURATE_DETECTION | Related to SL_BODY_TRACKING_MODEL_HUMAN_BODY_ACCURATE |
| SL_AI_MODELS_HUMAN_BODY_38_FAST_DETECTION | Related to SL_BODY_TRACKING_MODEL_HUMAN_BODY_FAST |
| SL_AI_MODELS_HUMAN_BODY_38_MEDIUM_DETECTION | Related to SL_BODY_TRACKING_MODEL_HUMAN_BODY_FAST |
| SL_AI_MODELS_HUMAN_BODY_38_ACCURATE_DETECTION | Related to SL_BODY_TRACKING_MODEL_HUMAN_BODY_FAST |
| SL_AI_MODELS_PERSON_HEAD_DETECTION | Related to SL_BODY_TRACKING_MODEL_HUMAN_BODY_FAST |
| SL_AI_MODELS_PERSON_HEAD_ACCURATE_DETECTION | Related to SL_OBJECT_DETECTION_MODEL_PERSON_HEAD_BOX_ACCURATE |
| SL_AI_MODELS_REID_ASSOCIATION | Related to SL_BatchParameters::enable |
| SL_AI_MODELS_NEURAL_LIGHT_DEPTH | Related to SL_DEPTH_MODE_NEURAL_LIGHT |
| SL_AI_MODELS_NEURAL_DEPTH | Related to SL_DEPTH_MODE_NEURAL |
| SL_AI_MODELS_NEURAL_PLUS_DEPTH | Related to SL_DEPTH_MODE_NEURAL_PLUS |
Lists supported bounding box preprocessing.
Lists supported bounding box preprocessing.
| enum SL_BODY_FORMAT |
| enum SL_BODY_18_PARTS |
Semantic of human body parts and order of SL_BodyData::keypoint for SL_BODY_FORMAT_BODY_18.
| enum SL_BODY_34_PARTS |
Semantic of human body parts and order of SL_BodyData::keypoint for SL_BODY_FORMAT_BODY_34.
| enum SL_BODY_38_PARTS |
Semantic of human body parts and order of SL_BodyData::keypoint for SL_BODY_FORMAT_BODY_38.
| enum SL_MODULE |
| enum SL_POSITION_TYPE |
| enum SL_OBJECT_CLASS |
Lists available object classes.
| enum SL_FUSION_ERROR_CODE |
Lists the types of error that can be raised by the Fusion.
| enum SL_SENDER_ERROR_CODE |
| enum SL_COMM_TYPE |
Lists the different types of communications available for Fusion module.
| enum SL_GNSS_STATUS |
Class representing the fix quality of GNSS signal.
| enum SL_GNSS_MODE |
Class containing the current GNSS fusion status.
Enum to define the reference frame of the fusion SDK.