Classes | |
| struct | DeviceProperties |
| Properties of a camera. More... | |
| struct | StreamingProperties |
| Properties of a all streaming devices. More... | |
| class | InputType |
| Defines the input type used in the ZED SDK. Can be used to select a specific camera with ID or serial number, or a svo file. More... | |
Enumerations | |
| enum | UNIT |
| Lists available unit for measures. More... | |
| enum | COORDINATE_SYSTEM |
| Lists available coordinates systems for positional tracking and 3D measures. More... | |
| enum | ERROR_CODE |
| Lists error codes in the ZED SDK. More... | |
| enum | MODEL |
| Lists compatible ZED Camera model. More... | |
| enum | INPUT_TYPE |
| Lists availble input type in SDK. More... | |
| enum | CAMERA_STATE |
| List of possible camera state. More... | |
| enum | STREAMING_CODEC |
| List of possible camera state. More... | |
Functions | |
| String | toString (const UNIT &unit) |
| Converts the given enum to a readable string. More... | |
| String | toString (const COORDINATE_SYSTEM &coord_system) |
| Converts the given enum to a readable string. More... | |
| String | toString (const ERROR_CODE &errorCode) |
| Converts the given enum to a readable string. More... | |
| String | toVerbose (const ERROR_CODE &errorCode) |
| Return a text explaining how to fix the given ERROR_CODE. More... | |
| String | toString (const MODEL &model) |
| Converts the given enum to a readable string. More... | |
| String | toString (const INPUT_TYPE &input_type) |
| Converts the given enum to a readable string. More... | |
| String | toString (const CAMERA_STATE &camera_state) |
| Converts the given enum to a readable string. More... | |
| String | toString (const DeviceProperties &properties) |
| Converts the given struct to a readable string. More... | |
| String | toString (const StreamingProperties &properties) |
| Converts the given struct to a readable string. More... | |
Enumeration conversion | |
| String | model2str (MODEL model) |
| Converts the given MODEL into a string. More... | |
| String | errorCode2str (ERROR_CODE errorCode) |
| Converts the given ERROR_CODE into a string. More... | |
| String | unit2str (UNIT unit) |
| Converts the given UNIT into a string. More... | |
| UNIT | str2unit (String unit) |
| Converts the given string into a UNIT. More... | |
| enum UNIT |
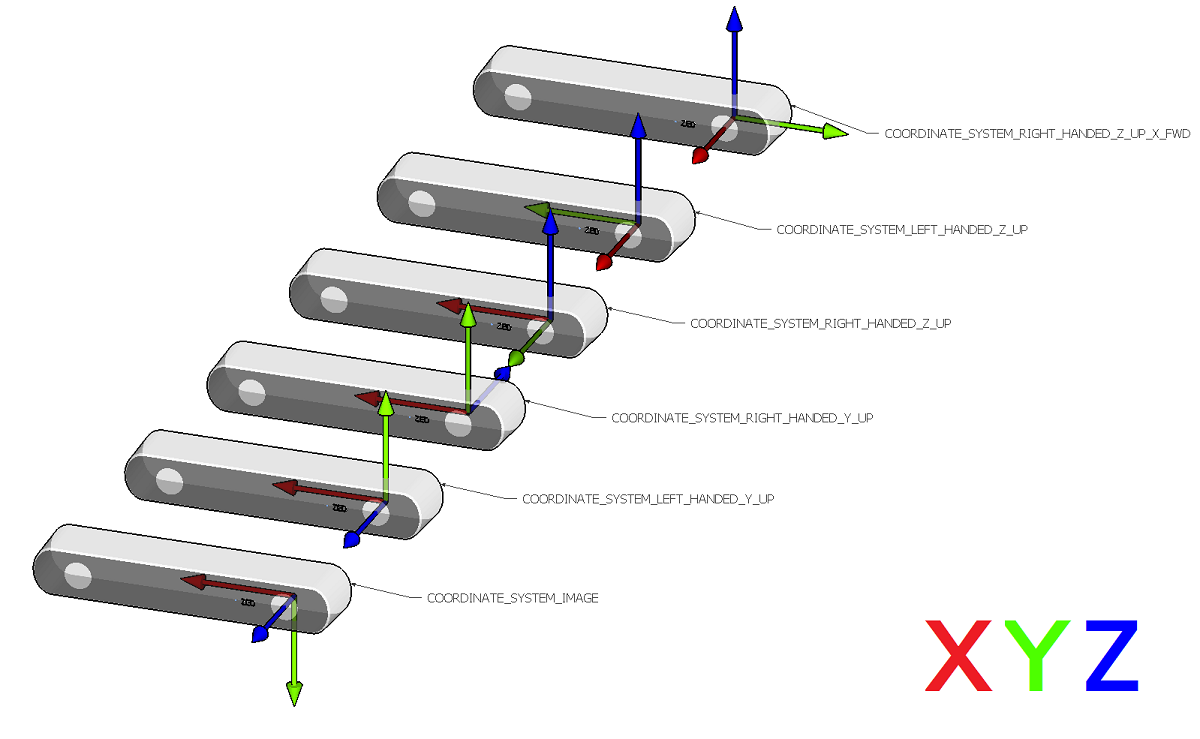
| enum COORDINATE_SYSTEM |
Lists available coordinates systems for positional tracking and 3D measures.
| Enumerator | |
|---|---|
| COORDINATE_SYSTEM_IMAGE | Standard coordinates system in computer vision. Used in OpenCV : see here : http://docs.opencv.org/2.4/modules/calib3d/doc/camera_calibration_and_3d_reconstruction.html |
| COORDINATE_SYSTEM_LEFT_HANDED_Y_UP | Left-Handed with Y up and Z forward. Used in Unity with DirectX. |
| COORDINATE_SYSTEM_RIGHT_HANDED_Y_UP | Right-Handed with Y pointing up and Z backward. Used in OpenGL. |
| COORDINATE_SYSTEM_RIGHT_HANDED_Z_UP | Right-Handed with Z pointing up and Y forward. Used in 3DSMax. |
| COORDINATE_SYSTEM_LEFT_HANDED_Z_UP | Left-Handed with Z axis pointing up and X forward. Used in Unreal Engine. |
| COORDINATE_SYSTEM_RIGHT_HANDED_Z_UP_X_FWD | Right-Handed with Z pointing up and X forward. Used in ROS (REP 103). |
| COORDINATE_SYSTEM_LAST | |
| enum ERROR_CODE |
Lists error codes in the ZED SDK.
| Enumerator | |
|---|---|
| SUCCESS | Standard code for successful behavior. |
| ERROR_CODE_FAILURE | Standard code for unsuccessful behavior. |
| ERROR_CODE_NO_GPU_COMPATIBLE | No GPU found or CUDA capability of the device is not supported. |
| ERROR_CODE_NOT_ENOUGH_GPUMEM | Not enough GPU memory for this depth mode, try a different mode (such as PERFORMANCE). |
| ERROR_CODE_CAMERA_NOT_DETECTED | The ZED camera is not plugged or detected. |
| ERROR_CODE_SENSOR_NOT_DETECTED | a ZED-M camera is detected but the sensor (imu) cannot be opened. Only for ZED-M device |
| ERROR_CODE_INVALID_RESOLUTION | For Nvidia Jetson X1 only, resolution not yet supported (USB3.0 bandwidth). |
| ERROR_CODE_LOW_USB_BANDWIDTH | This issue can occurs when you use multiple ZED or a USB 2.0 port (bandwidth issue). |
| ERROR_CODE_CALIBRATION_FILE_NOT_AVAILABLE | ZED calibration file is not found on the host machine. Use ZED Explorer or ZED Calibration to get one. |
| ERROR_CODE_INVALID_CALIBRATION_FILE | ZED calibration file is not valid, try to download the factory one or recalibrate your camera using 'ZED Calibration'. |
| ERROR_CODE_INVALID_SVO_FILE | The provided SVO file is not valid. |
| ERROR_CODE_SVO_RECORDING_ERROR | An recorder related error occurred (not enough free storage, invalid file). |
| ERROR_CODE_SVO_UNSUPPORTED_COMPRESSION | An SVO related error when NVIDIA based compression cannot be loaded. |
| ERROR_CODE_INVALID_COORDINATE_SYSTEM | The requested coordinate system is not available. |
| ERROR_CODE_INVALID_FIRMWARE | The firmware of the ZED is out of date. Update to the latest version. |
| ERROR_CODE_INVALID_FUNCTION_PARAMETERS | An invalid parameter has been set for the function. |
| ERROR_CODE_NOT_A_NEW_FRAME | In grab() only, the current call return the same frame as last call. Not a new frame. |
| ERROR_CODE_CUDA_ERROR | In grab() only, a CUDA error has been detected in the process. Activate verbose in sl::Camera::open for more info. |
| ERROR_CODE_CAMERA_NOT_INITIALIZED | In grab() only, ZED SDK is not initialized. Probably a missing call to sl::Camera::open. |
| ERROR_CODE_NVIDIA_DRIVER_OUT_OF_DATE | Your NVIDIA driver is too old and not compatible with your current CUDA version. |
| ERROR_CODE_INVALID_FUNCTION_CALL | The call of the function is not valid in the current context. Could be a missing call of sl::Camera::open. |
| ERROR_CODE_CORRUPTED_SDK_INSTALLATION | The SDK wasn't able to load its dependencies, the installer should be launched. |
| ERROR_CODE_INCOMPATIBLE_SDK_VERSION | The installed SDK is incompatible SDK used to compile the program. |
| ERROR_CODE_INVALID_AREA_FILE | The given area file does not exist, check the path. |
| ERROR_CODE_INCOMPATIBLE_AREA_FILE | The area file does not contain enought data to be used or the sl::DEPTH_MODE used during the creation of the area file is different from the one currently set. |
| ERROR_CODE_CAMERA_FAILED_TO_SETUP | Failed to open the camera at the proper resolution. Try another resolution or make sure that the UVC driver is properly installed. |
| ERROR_CODE_CAMERA_DETECTION_ISSUE | Your ZED can not be opened, try replugging it to another USB port or flipping the USB-C connector. |
| ERROR_CODE_CAMERA_ALREADY_IN_USE | The Camera is already used by another process. |
| ERROR_CODE_NO_GPU_DETECTED | No GPU found, CUDA is unable to list it. Can be a driver/reboot issue. |
| ERROR_CODE_PLANE_NOT_FOUND | Plane not found, either no plane is detected in the scene, at the location or corresponding to the floor, or the floor plane doesn't match the prior given |
| ERROR_CODE_LAST | |
| enum MODEL |
| enum INPUT_TYPE |
| enum CAMERA_STATE |
| enum STREAMING_CODEC |
Converts the given enum to a readable string.
Referenced by Camera::isOpened().
| String sl::toString | ( | const COORDINATE_SYSTEM & | coord_system | ) |
Converts the given enum to a readable string.
| String sl::toString | ( | const ERROR_CODE & | errorCode | ) |
Converts the given enum to a readable string.
| String sl::toVerbose | ( | const ERROR_CODE & | errorCode | ) |
Return a text explaining how to fix the given ERROR_CODE.
Converts the given enum to a readable string.
| String sl::toString | ( | const INPUT_TYPE & | input_type | ) |
Converts the given enum to a readable string.
| String sl::toString | ( | const CAMERA_STATE & | camera_state | ) |
Converts the given enum to a readable string.
| String sl::toString | ( | const DeviceProperties & | properties | ) |
Converts the given struct to a readable string.
| String sl::toString | ( | const StreamingProperties & | properties | ) |
Converts the given struct to a readable string.
Converts the given MODEL into a string.
| model | : a specific MODEL |
| String sl::errorCode2str | ( | ERROR_CODE | errorCode | ) |
Converts the given ERROR_CODE into a string.
| err | : a specific ERROR_CODE |
Converts the given UNIT into a string.
| unit | : a specific UNIT |

