Introducing ZED SDK 5.1: Pushing Robotics Multi-Camera Perception Further Than Ever
A major update delivering higher performance, expanded compatibility, and new tools for real-time, multi-camera robotics perception.
ZED SDK 5.1 pushes the limits of real-time multi-camera perception on robotics platforms. With a redesigned capture and recording pipeline, enhanced positional tracking, new close-range depth sensing, and official Jetson Thor support, this release makes every part of the ZED ecosystem faster, more robust, and more capable in industrial environments.
Let’s explore what’s new.
High-Performance Capture Rebuilt for Robotics
The image capture system has been completely reworked to support real-time, low-latency multi-camera systems. ZED SDK 5.1 new capture stack deliver greater performance, reliability and lower latency across all camera modes for capture, recording and streaming.
On Jetson embedded devices, streaming latency is now under 100ms, ensuring smoother feedback loops for autonomous systems and teleoperation. Recording is lighter too, with SVO2 recording now imposing less system load with improved stability for long sessions.

NVIDIA Jetson AGX Thor Dev Kit & ZED 2i
With ZED Driver 1.3.1, we’ve added PREEMPT_RT support for real-time kernel modes, bringing more control and low-latency responses for time-critical applications. Available for all ZED Box, ZED Box Mini, and NVIDIA AGX Orin Developer Kit.
Jetson Thor Support
ZED SDK 5.1 also embraces NVIDIA’s newest embedded platform, Jetson Thor, supported alongside JetPack 7, with a new BSP based on Ubuntu 24.04. ZED cameras can now leverage Thor’s compute power for up to 2.5× higher performance, unlocking richer perception at the edge (hardware Encoding and decoding will be enabled with a future JetPack update).
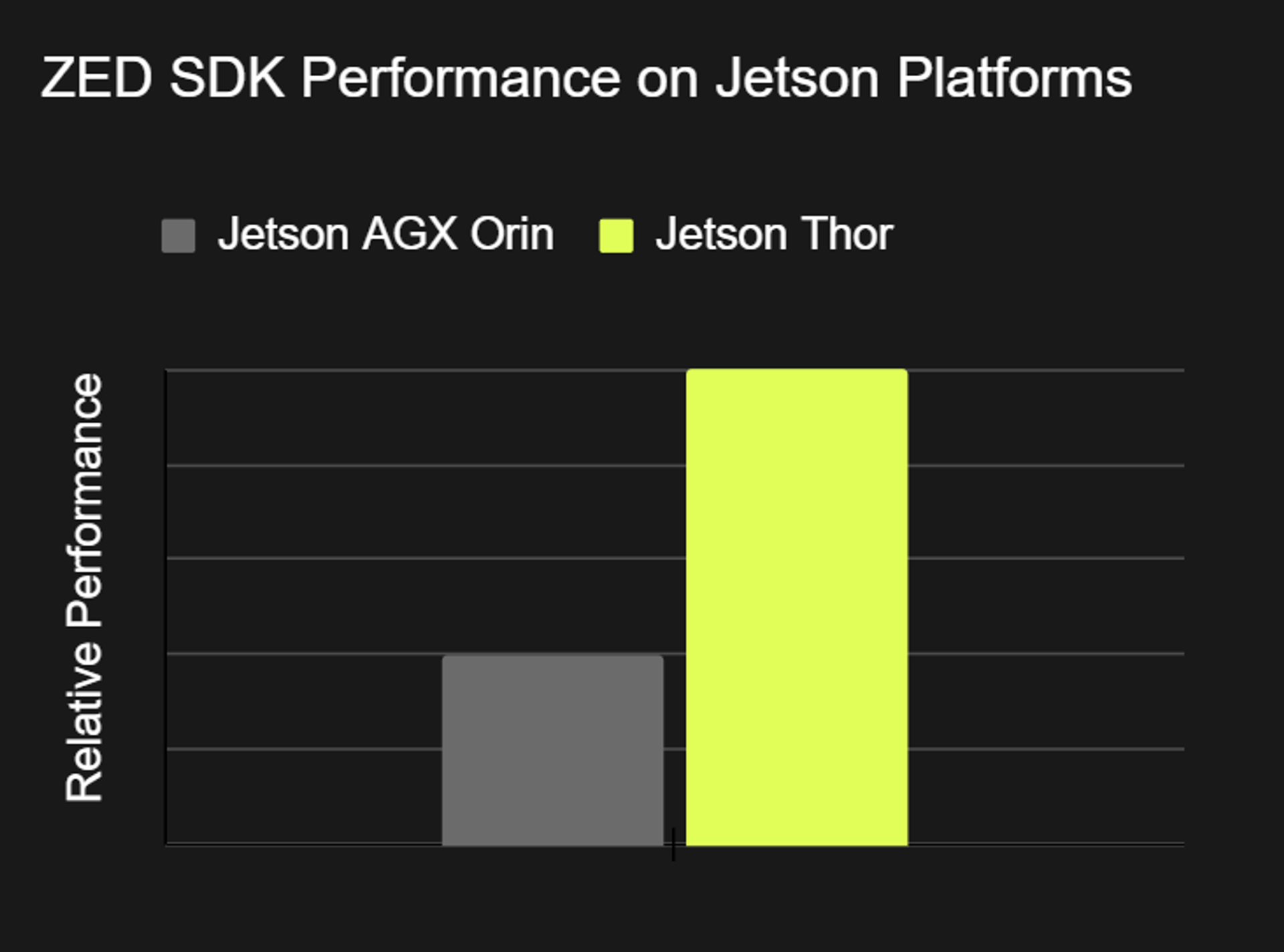
ZED SDK performance
Meet ZED Studio: One App. Unlimited Cameras
Multi-camera perception is becoming the standard in next-gen robotics. The brand-new ZED Studio tool brings all your camera, stream, and SVO management into a single unified application.
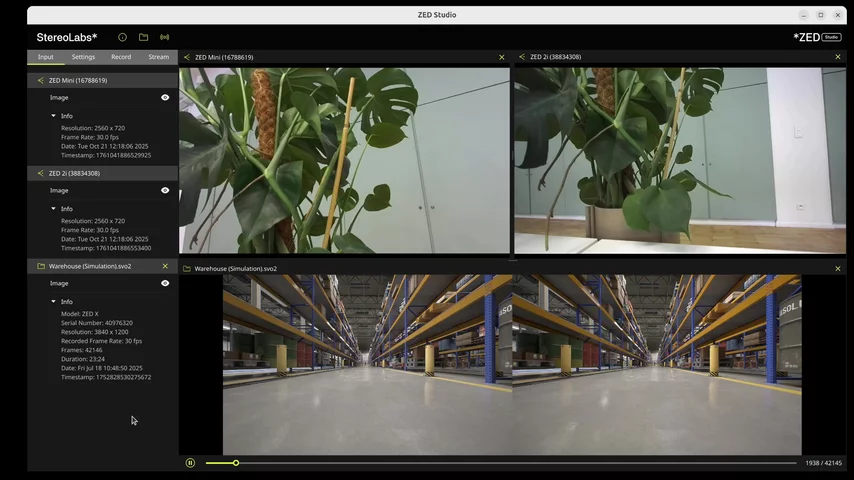
New ZED Studio multicamera tool
You can now view and control multiple cameras simultaneously, record synchronized streams, and organize playback and live views in customizable layouts.
ZED Studio supports:
- Multi-camera live view and recording
- Synchronized playback and stream management
- Group control of camera settings
- Command-line launch options for automation
On Windows, ZED Studio now replaces older viewers as the default app for opening SVO files — providing a consistent, cross-platform interface for managing your ZED ecosystem.
Isaac™ ROS Integration: Real-Time Acceleration for ROS 2
The latest update to the ZED ROS 2 Wrapper brings seamless integration with the NVIDIA® Isaac™ ROS framework, empowering developers to tap into the full potential of NVIDIA GPUs for real-time perception and computer vision tasks.
By leveraging NITROS (NVIDIA® Isaac™ Transport for ROS), the wrapper now achieves up to 10× lower latency for image topic publishing compared to traditional CPU-based transport. This acceleration is made possible through direct GPU memory sharing, eliminating costly data copies between CPU and GPU.
The result: faster data streaming, reduced CPU and GPU load, and a smoother, more efficient ROS 2 pipeline for demanding robotics and AI applications. More information on our documentation.
Improved Depth Perception at Short-Range
The updated depth module unlocks centimeter-level close-range sensing, a breakthrough for manipulation, assembly, and inspection robots. This refinement brings reliable, artifact-free depth even when objects are just a few centimeters away — perfect for robotic arms, humanoids, grippers, end-effectors, or near-field scene reconstruction.
Self-calibration has also been improved in close-range scenarios, adapting more robustly to challenging scenes, and automatically diagnosing and correcting potential misalignments, allowing cameras to operate robustly 24/7.
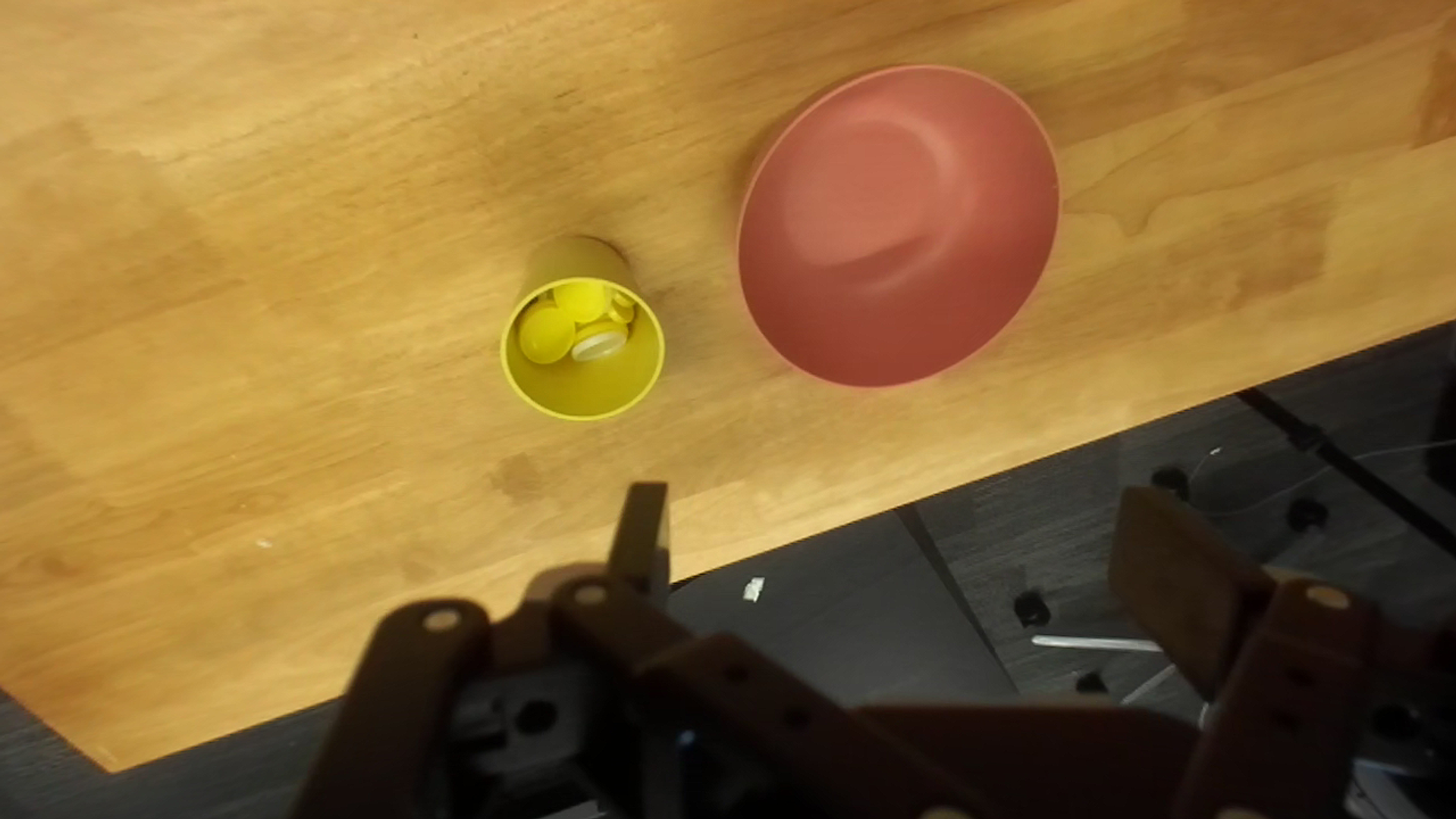
RGB Image (DROID Dataset)
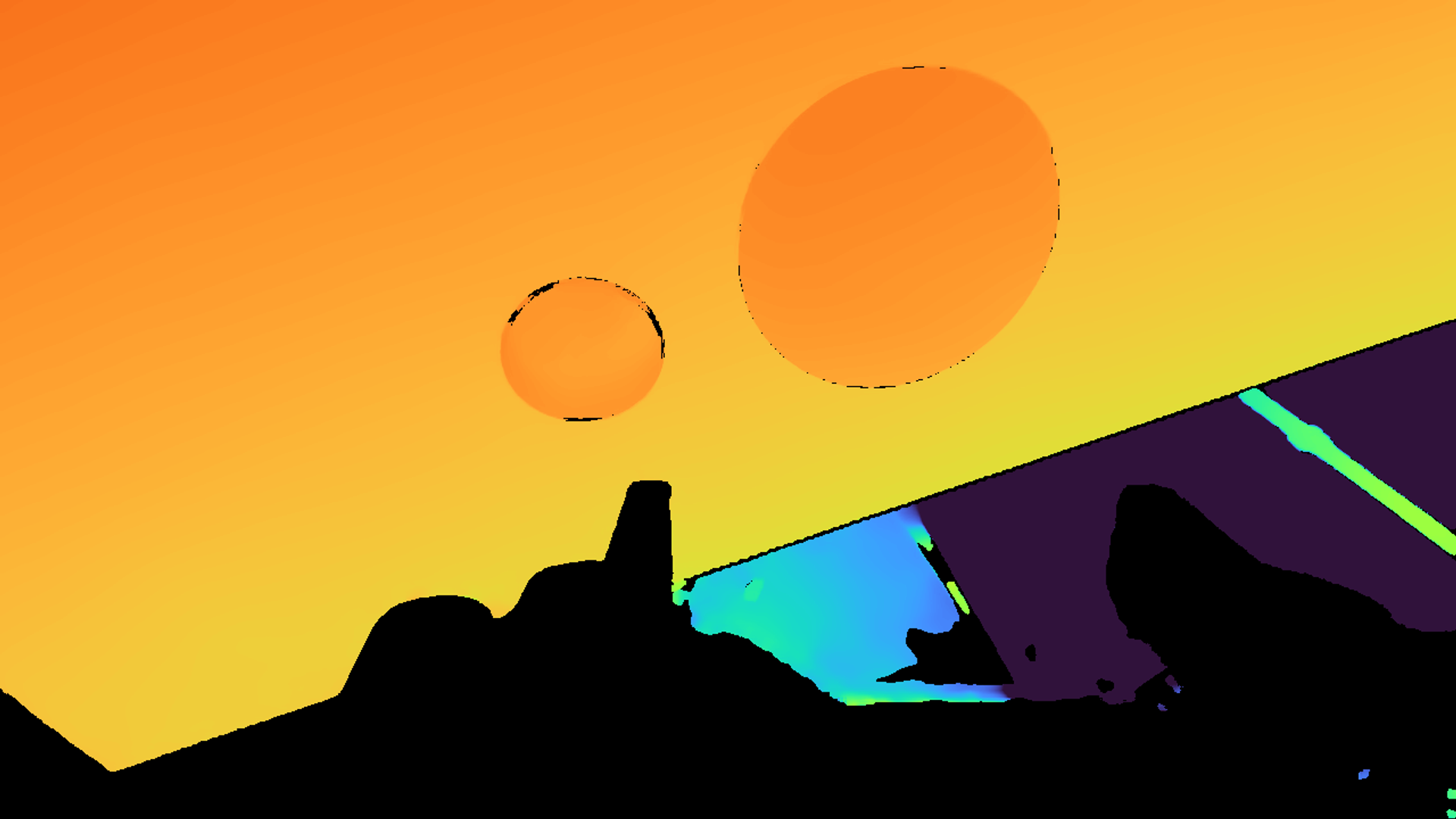
ZED SDK 5.0 depth map
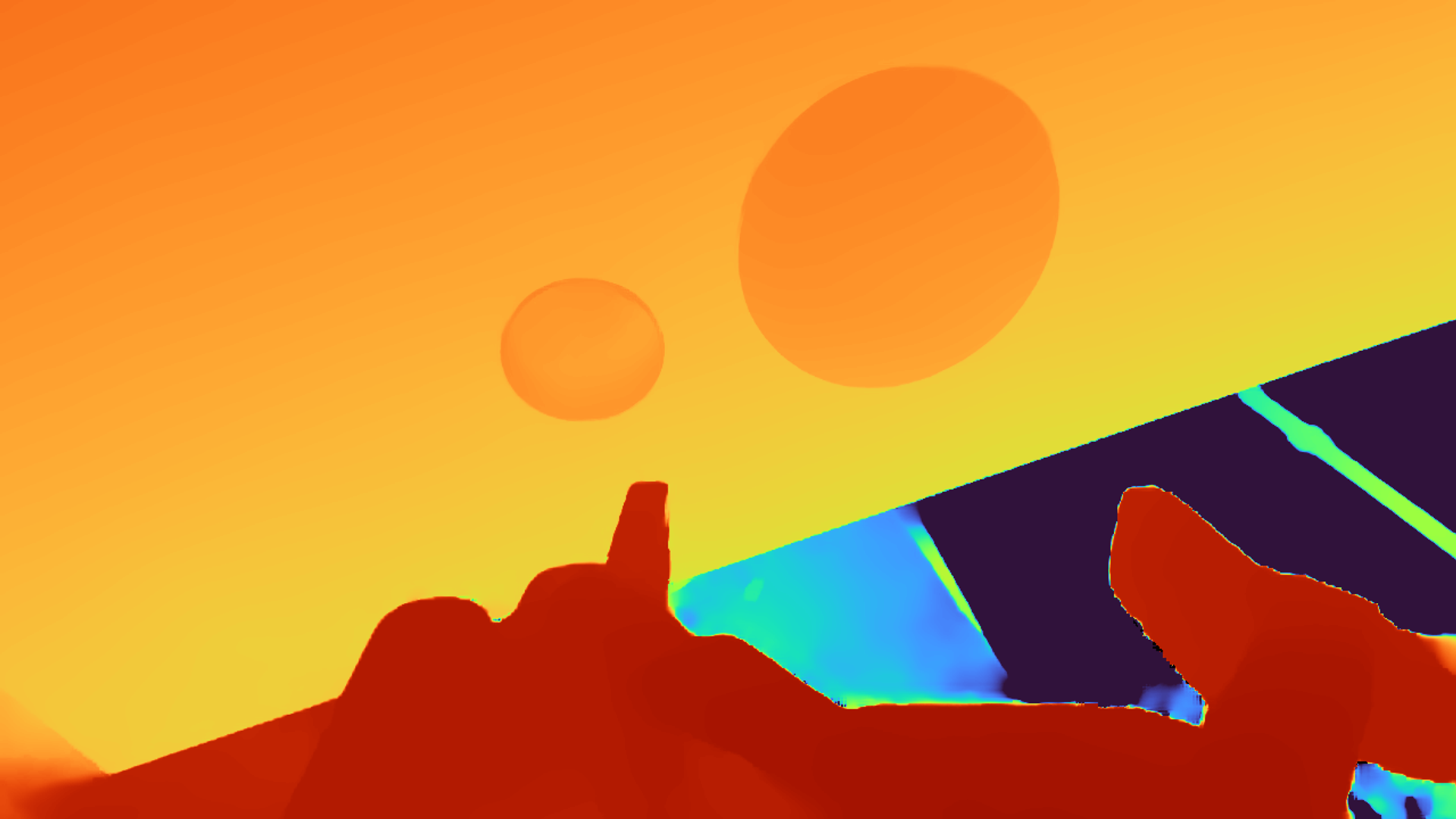
ZED SDK 5.1 depth map
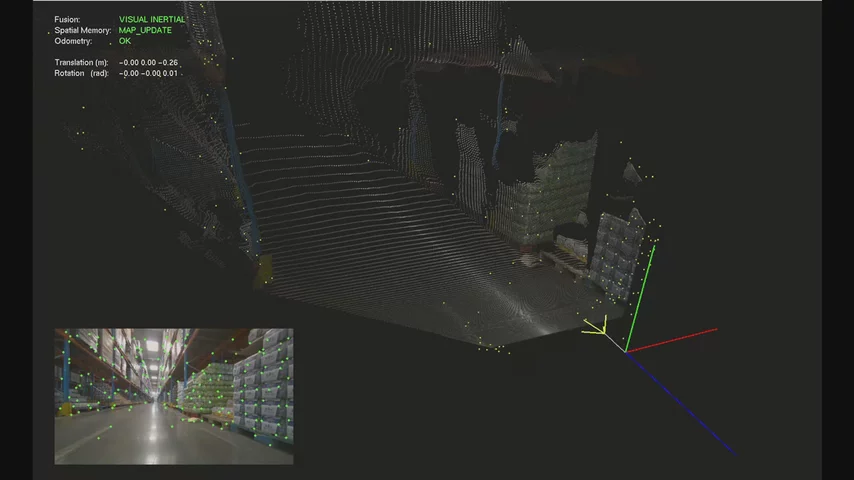
Robust SLAM for Real-World Deployments
The Positional Tracking GEN 3 module has been strengthened with improved robustness against dynamic occlusions and image corruption. It now handles more complex environments and moving objects while maintaining accurate localization.
VSLAM key frames
A new SPATIAL_MEMORY status provides better feedback during camera relocalization and loop closure events, making it easier to monitor localization and tracking performance.
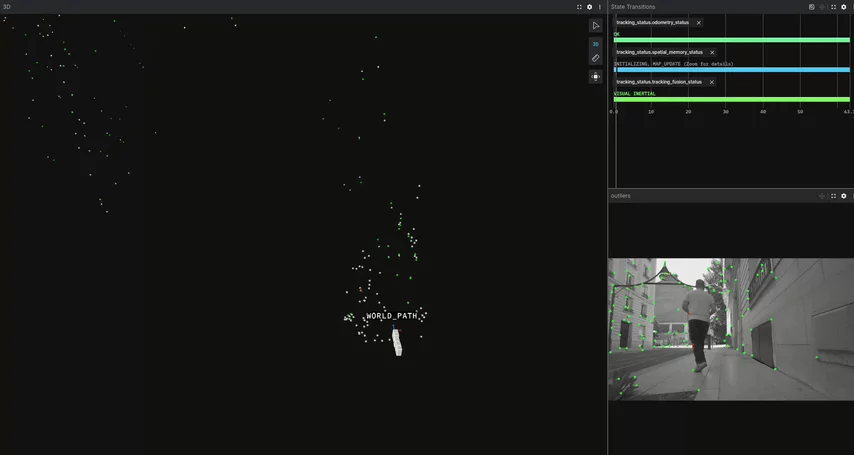
New VSLAM 2D mode in the updated sample visualizer
ZED SDK 5.1 also introduces a 2D ground tracking mode, ideal for grounded robots and wheeled vehicles. This mode constrains tracking to the plane of motion, reducing drift and improving localization accuracy in planar environments such as factory floors or indoor navigation setups.
Finally, the SLAM code sample now offers an updated, richer visualization that exposes these states and events at a glance.
Major Performance Improvements for ZED X One Capture
Building stereo pairs from two ZED X One cameras is now dramatically faster thanks to the new Live Virtual Stereo API. The system is roughly 2.5× more CPU-efficient than before. Developers can configure virtual pairs directly through the SDK, and even work in an uncalibrated mode for SVO recording or streaming raw imagery for later alignment. These improvements mark the end of the ZED Media Server era, its role is now fully absorbed and outperformed by the SDK’s native Virtual Stereo tools. You can find the new API here and a code sample on our GitHub.
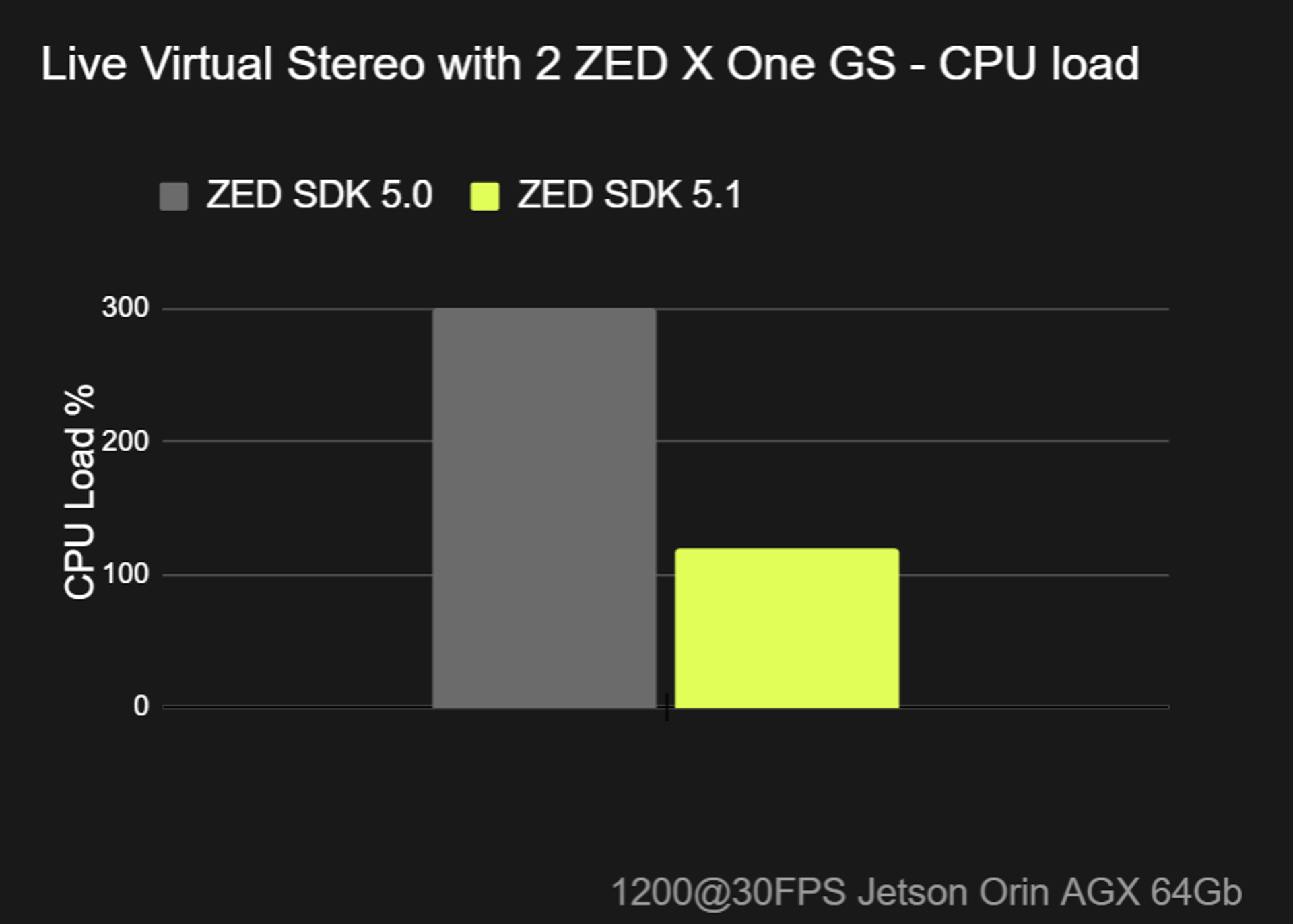
Improved Virtual Stereo CPU load
Native Fisheye Calibration
ZED SDK 5.1 adds native support for OpenCV fisheye calibration files, unlocking the use of fisheye lenses with ZED SDK cameras. This makes it easier to integrate wide-angle fisheye lenses in existing workflows, an essential step for developers building navigation systems or panoramic vision rigs that demand a wider field of view. To calibrate your ZED with a fisheye lens, check out our official repository on GitHub here.
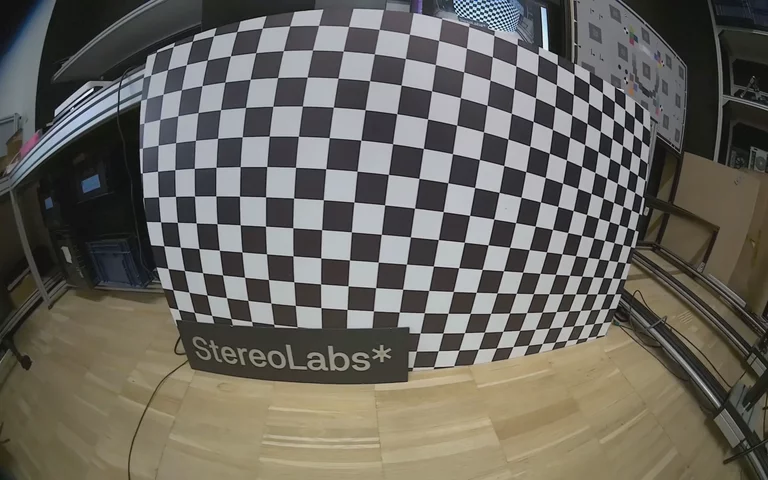
Raw fisheye view

Rectified fisheye view
Wider Compatibility and a Leaner Install

ZED SDK 5.1 broadens support across major development environments:
- CUDA 13
- JetPack 7
- Python 3.14
- C++17 and C++20
Python developers benefit from faster GPU data transfer through CuPy integration, and new sample scripts demonstrate optimized usage for depth and object detection.
The SDK installer has also been optimized, now 40% smaller on Linux with TensorRT 10. Docker images are versioned for easy deployment and reproducibility.
Upgrade to Next Generation AI Perception
ZED SDK 5.1 is more than an update, it’s a leap forward in efficiency, precision, and flexibility for spatial AI. From improved multi-camera capture, to closer-range depth, better SLAM, Jetson Thor support and the new ZED Studio, every part of the ecosystem has been refined to help you build faster, smarter, and more reliable vision systems.
Ready to experience it? Download ZED SDK 5.1 now and start pushing the boundaries of what your robots and applications can see.





