Classes | |
| struct | Timestamp |
| Timesamp representation and utilities. More... | |
| class | String |
| Defines a string. More... | |
| struct | Resolution |
| Width and height of an array. More... | |
| class | Rect |
| Defines a 2D rectangle with top-left corner coordinates and width/height in pixels. More... | |
| class | Matrix3f |
| Represents a generic 3*3 matrix. More... | |
| class | Matrix4f |
| Represents a generic 4*4 matrix. More... | |
| class | Vector2< T > |
| Represents a two dimensions vector for both CPU and GPU. More... | |
| class | Vector3< T > |
| Represents a three dimensions vector for both CPU and GPU. More... | |
| class | Vector4< T > |
| Represents a four dimensions vector for both CPU and GPU. More... | |
| class | Mat |
| The Mat class can handle multiple matrix formats from 1 to 4 channels, with different value types (float or uchar), and can be stored CPU and/or GPU side. More... | |
| struct | CameraConfiguration |
| Structure containing information about the camera sensor. More... | |
| struct | CameraInformation |
| Structure containing information of a single camera (serial number, model, input type, etc.) More... | |
Enumerations | |
| enum class | UNIT |
| Lists available unit for measures. More... | |
| enum class | COORDINATE_SYSTEM |
| Lists available coordinates systems for positional tracking and 3D measures. More... | |
| enum class | ERROR_CODE |
| Lists error codes in the ZED SDK. More... | |
| enum class | MEM |
| List available memory type. More... | |
| enum class | COPY_TYPE |
| List available copy operation on Mat. More... | |
| enum class | MAT_TYPE |
| List available Mat formats. More... | |
Functions | |
| int | getZEDSDKRuntimeVersion (int &major, int &minor, int &patch) |
| Dynamic version verification: Returns the ZED SDK version currently installed on the computer. The major, minor, patch parameters will be filled by reference. More... | |
| const void | getZEDSDKBuildVersion (int &major, int &minor, int &patch) |
| Returns the ZED SDK version which the current program has been compiled with. The major, minor, patch parameters will be filled by reference. More... | |
| void | sleep_ms (int time) |
| Tells the program to wait for x ms. More... | |
| void | sleep_us (int time) |
| Tells the program to wait for x us. More... | |
|
strong |
|
strong |
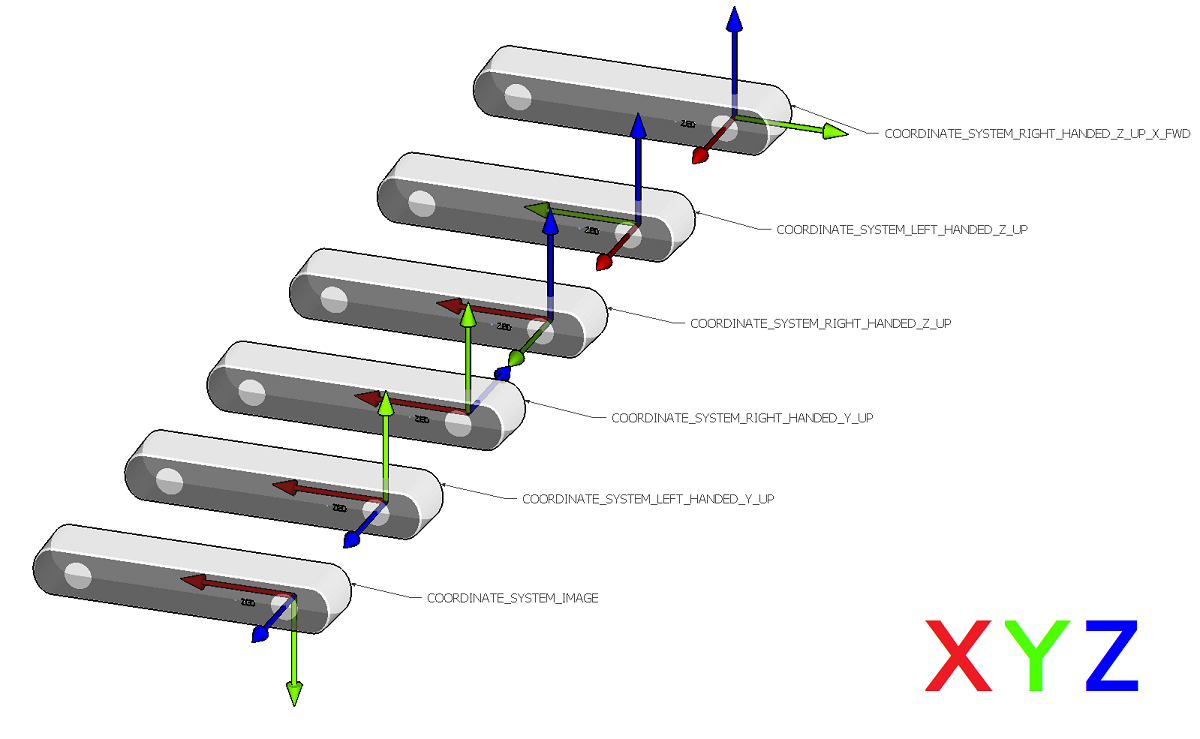
Lists available coordinates systems for positional tracking and 3D measures.
| Enumerator | |
|---|---|
| IMAGE | Standard coordinates system in computer vision. Used in OpenCV : see here : http://docs.opencv.org/2.4/modules/calib3d/doc/camera_calibration_and_3d_reconstruction.html |
| LEFT_HANDED_Y_UP | Left-Handed with Y up and Z forward. Used in Unity with DirectX. |
| RIGHT_HANDED_Y_UP | Right-Handed with Y pointing up and Z backward. Used in OpenGL. |
| RIGHT_HANDED_Z_UP | Right-Handed with Z pointing up and Y forward. Used in 3DSMax. |
| LEFT_HANDED_Z_UP | Left-Handed with Z axis pointing up and X forward. Used in Unreal Engine. |
| RIGHT_HANDED_Z_UP_X_FWD | Right-Handed with Z pointing up and X forward. Used in ROS (REP 103). |
|
strong |
Lists error codes in the ZED SDK.
| Enumerator | |
|---|---|
| SUCCESS | Standard code for successful behavior. |
| FAILURE | Standard code for unsuccessful behavior. |
| NO_GPU_COMPATIBLE | No GPU found or CUDA capability of the device is not supported. |
| NOT_ENOUGH_GPU_MEMORY | Not enough GPU memory for this depth mode, try a different mode (such as PERFORMANCE), or increase the minimum depth value (see InitParameters::depth_minimum_distance). |
| CAMERA_NOT_DETECTED | The ZED camera is not plugged or detected. |
| SENSORS_NOT_INITIALIZED | The MCU that controls the sensors module has an invalid Serial Number. You can try to recover it launching the 'ZED Diagnostic' tool from the command line with the option '-r'. |
| SENSORS_NOT_AVAILABLE | a ZED-M or ZED2/2i camera is detected but the sensors (imu,barometer...) cannot be opened. Only for ZED-M or ZED2/2i devices. Unplug/replug is required |
| INVALID_RESOLUTION | In case of invalid resolution parameter, such as a upsize beyond the original image size in Camera::retrieveImage |
| LOW_USB_BANDWIDTH | This issue can occurs when you use multiple ZED or a USB 2.0 port (bandwidth issue). |
| CALIBRATION_FILE_NOT_AVAILABLE | ZED calibration file is not found on the host machine. Use ZED Explorer or ZED Calibration to get one. |
| INVALID_CALIBRATION_FILE | ZED calibration file is not valid, try to download the factory one or recalibrate your camera using 'ZED Calibration'. |
| INVALID_SVO_FILE | The provided SVO file is not valid. |
| SVO_RECORDING_ERROR | An recorder related error occurred (not enough free storage, invalid file). |
| SVO_UNSUPPORTED_COMPRESSION | An SVO related error when NVIDIA based compression cannot be loaded. |
| END_OF_SVOFILE_REACHED | SVO end of file has been reached, and no frame will be available until the SVO position is reset. |
| INVALID_COORDINATE_SYSTEM | The requested coordinate system is not available. |
| INVALID_FIRMWARE | The firmware of the ZED is out of date. Update to the latest version. |
| INVALID_FUNCTION_PARAMETERS | An invalid parameter has been set for the function. |
| CUDA_ERROR | In grab() or retrieveXXX() only, a CUDA error has been detected in the process. Activate verbose in sl::Camera::open for more info. |
| CAMERA_NOT_INITIALIZED | In grab() only, ZED SDK is not initialized. Probably a missing call to sl::Camera::open. |
| NVIDIA_DRIVER_OUT_OF_DATE | Your NVIDIA driver is too old and not compatible with your current CUDA version. |
| INVALID_FUNCTION_CALL | The call of the function is not valid in the current context. Could be a missing call of sl::Camera::open. |
| CORRUPTED_SDK_INSTALLATION | The SDK wasn't able to load its dependencies or somes assets are missing, reinstall the ZED or check for missing dependencies (cudnn, TensorRt). |
| INCOMPATIBLE_SDK_VERSION | The installed SDK is incompatible SDK used to compile the program. |
| INVALID_AREA_FILE | The given area file does not exist, check the path. |
| INCOMPATIBLE_AREA_FILE | The area file does not contain enought data to be used or the sl::DEPTH_MODE used during the creation of the area file is different from the one currently set. |
| CAMERA_FAILED_TO_SETUP | Failed to open the camera at the proper resolution. Try another resolution or make sure that the UVC driver is properly installed. |
| CAMERA_DETECTION_ISSUE | Your ZED can not be opened, try replugging it to another USB port or flipping the USB-C connector. |
| CANNOT_START_CAMERA_STREAM | Cannot start camera stream. Make sure your camera is not already used by another process or blocked by firewall or antivirus. |
| NO_GPU_DETECTED | No GPU found, CUDA is unable to list it. Can be a driver/reboot issue. |
| PLANE_NOT_FOUND | Plane not found, either no plane is detected in the scene, at the location or corresponding to the floor, or the floor plane doesn't match the prior given |
| MODULE_NOT_COMPATIBLE_WITH_CAMERA | The Object detection module is only compatible with the ZED 2 |
| MOTION_SENSORS_REQUIRED | The module needs the sensors to be enabled (see InitParameters::sensors_required) |
| MODULE_NOT_COMPATIBLE_WITH_CUDA_VERSION | The module needs a newer version of CUDA |
|
strong |
|
strong |
List available copy operation on Mat.
| Enumerator | |
|---|---|
| CPU_CPU | copy data from CPU to CPU. |
| CPU_GPU | copy data from CPU to GPU. |
| GPU_GPU | copy data from GPU to GPU. |
| GPU_CPU | copy data from GPU to CPU. |
|
strong |
List available Mat formats.
| int getZEDSDKRuntimeVersion | ( | int & | major, |
| int & | minor, | ||
| int & | patch | ||
| ) |
Dynamic version verification: Returns the ZED SDK version currently installed on the computer. The major, minor, patch parameters will be filled by reference.
|
inline |
Returns the ZED SDK version which the current program has been compiled with. The major, minor, patch parameters will be filled by reference.
|
inline |
Tells the program to wait for x ms.
| time | : the number of ms to wait. |
|
inline |
Tells the program to wait for x us.
| time | : the number of us to wait. |

