Autonomous Rovers Race for OpenZeka Competition with ZED
Back in May at Yildiz Technical University in Istanbul, twenty small rovers raced through simulated streets complete with pedestrians, road construction, crosswalks, traffic signs and lights.
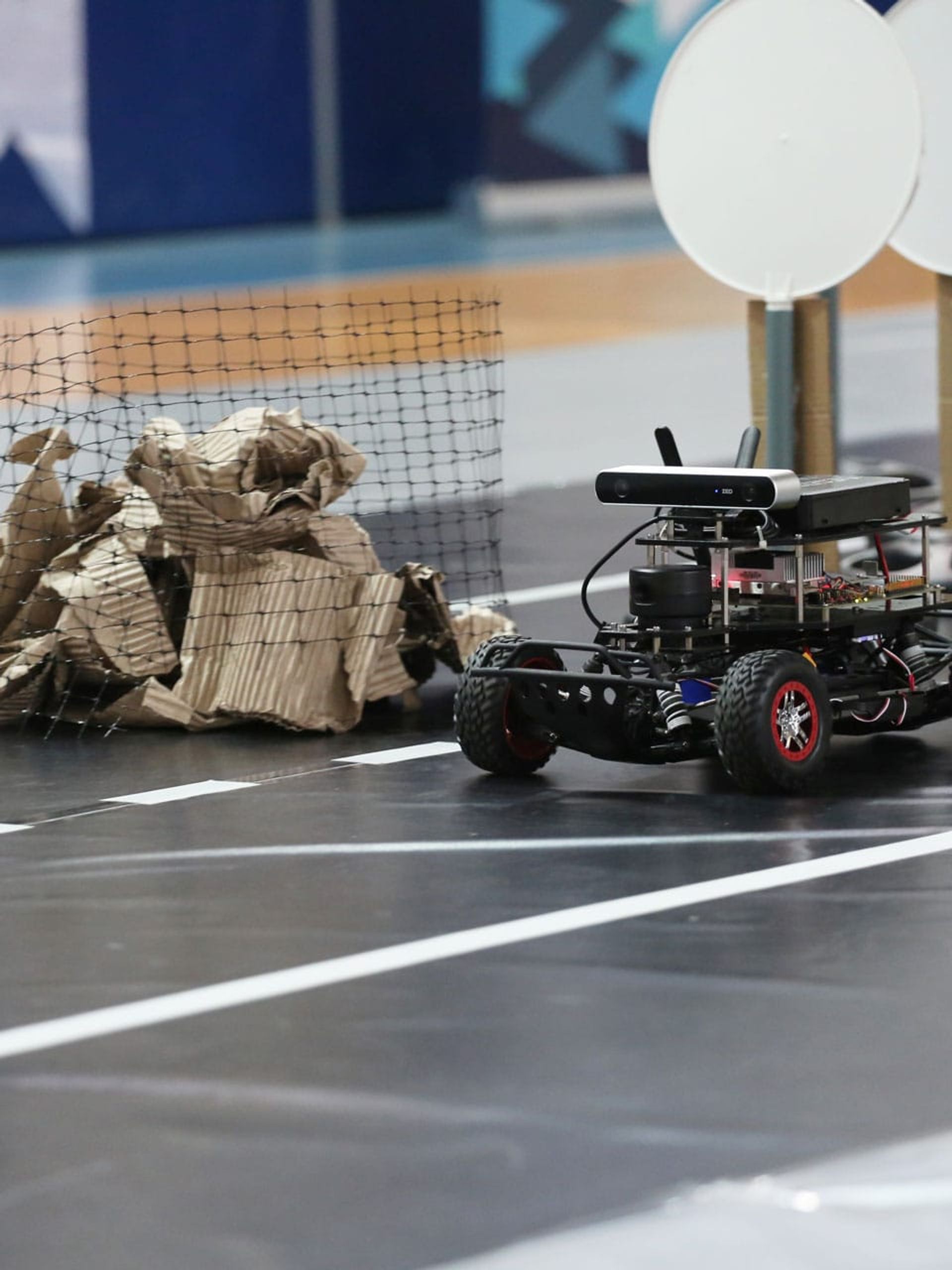
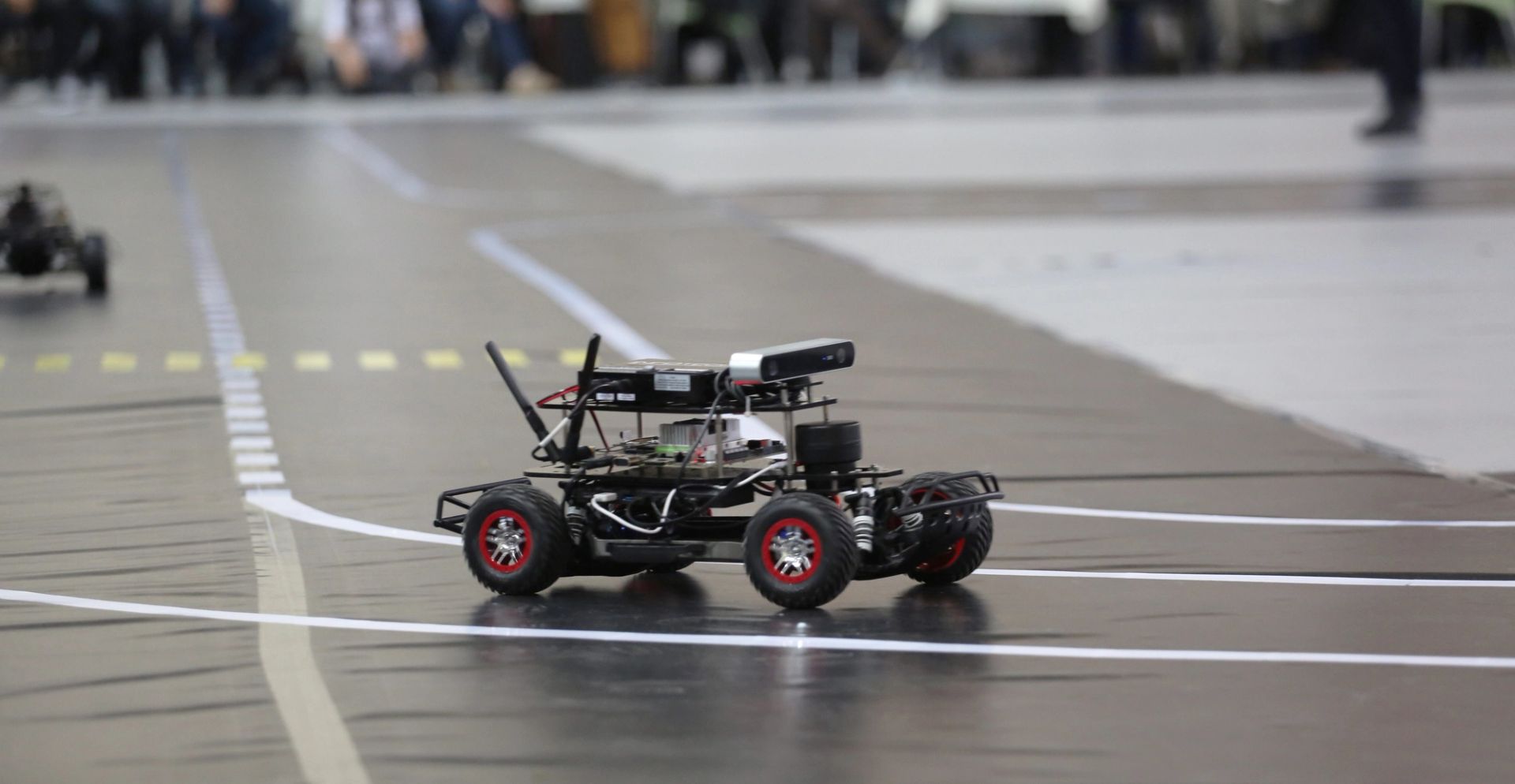
Back in May at Yildiz Technical University in Istanbul, twenty small rovers raced through simulated streets complete with pedestrians, road construction, crosswalks, traffic signs and lights. Each was fully autonomous, running software designed by high school and university teams from around the country. All of the vehicles used the ZED as the primary image sensor.
The OpenZeka Mini Autonomous Racecar Competition, or MARC, used standardized rovers OpenZeka created specifically for students and autonomous vehicle enthusiasts learning about robotics. As each team worked with the same hardware, the challenge was to program their rovers to solve the same traffic problems that real drivers do every day.
To complete the courses, the vehicles had to complete five tasks:
- Task 1: Stay between lanes in a semi-curved path
- Task 2: Navigate two-way roads while obeying traffic signs lights
- Task 3: Properly pass slower vehicles in the same lane and slow down when a “road work” sign is present
- Task 4: Yield to pedestrians that walk through crosswalks
- Task 5: Turn into a parking lot, find an empty spot with a “park” sign and correctly park between the lines
As all five tasks depend on image analysis, the ZED played a crucial role in each. The company chose the ZED as the primary depth sensor for its extended range. It also doesn’t suffer from signal interference between robots in close proximity, unlike many active sensors. The ZED is also well-optimized for NVIDIA’s Jetson TX2 embedded board. The Jetson TX2 is already a component of the rover and a favorite among robotics developers.

OpenZeka’s goal with the competition was to give Turkey’s budding engineers the skills they need to build fully-autonomous systems. This will help provid technology companies with the talent they need to push forward the artificial intelligence industry.

See a rover complete all the challenges below, and check out their YouTube channel for more videos.