Sensors Time Synchronization
Accurate time synchronization is required for reliable integration of data from multiple sensor sources. The ZED cameras and sensors share a common and low-drift reference clock. Incoming packets are timestamped upon reception by the host machine, in Epoch time with nanosecond resolution. These timestamps can be used to:
- Integrate multi-sensor data from a single camera such as IMU and stereo images.
- Fuse data with external sensor sources such as GPS or LiDAR.
Getting Time Synced Sensors Data
Sensors data is accessible by using the function getSensorsData(sensors_data, TIME_REFERENCE) as explained in the Using the API section.
The structure sensors_data is where data from the different sensors is stored. The TIME_REFERENCE variable is explained below.
Time Sync Reference
While the camera sensors are synchronized and share the same time reference, they have different operating frequencies (data rates). For example, the IMU on board the ZED 2 depth camera runs at 400 Hz, while images can be captured at 100 Hz maximum.
To simplify multi-sensor data acquisition, we provide a TIME_REFERENCE variable in the getSensorsData function that lets you define if you want to retrieve data synchronized with image frames or not:
TIME_REFERENCE::CURRENTlets you retrieve the most recent sensor data available.TIME_REFERENCE::IMAGElets you retrieve the closest sensor data to the last image frame.
The Camera-IMU synchronization schema below illustrates what values these two settings return.
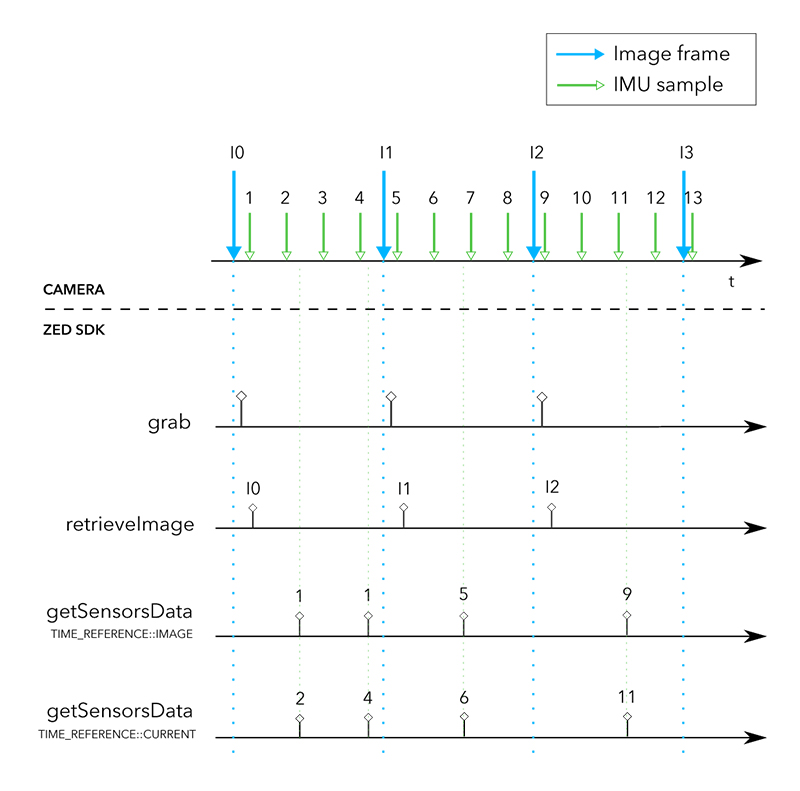
In the example above, we call the grab() function and retrieveImage() to retrieve the most recent image frame available from the camera. Then we call one of the two functions below:
-
getSensorsData(sensors_data, TIME_REFERENCE::IMAGE): It returns IMU sample “1” which was captured near image frame “I0”. We try to call the same function again before a new frame is available, and it returns the same IMU sample “1”. -
getSensorsData(sensors_data, TIME_REFERENCE::CURRENT): It returns the most recent IMU sample. We call the function twice and IMU samples “2” and “4” are returned, independently from grab call and image frame time.
Using the API
To learn how to retrieve current or image-synchronized sensor data, read the Using Sensors API section.