
ROS 2 - ZED Mono Node
The easiest way to start a ZED ROS 2 node for a monocular camera is by using the command line:
ros2 launch zed_wrapper zed_camera.launch.py camera_model:=<camera model>
where <camera model> must be replaced with one in the list zedxonegs, and zedxone4k
Published Topics #
The ZED node publishes data to the following topics:
Image streams
The image topic names are created using the following naming convention:
~/<sensor_type>/<color_model>/<rect_type>/image📌 Note: Starting from version 5.1.0 of the ROS 2 Wrapper the new convention replaces the previous formats such as
~/<sensor_type>/image_<rect_type>_<color_model>and~/<sensor_type>_<rect_type>/image_<rect_type>_<color_model>(e.g.,~/left/image_rect_color,~/rgb_raw/image_raw_gray). Please update your launch files and scripts to use the new topic names.- RGB channel
~/rgb/color/rect/image: Color rectified image.~/rgb/color/rect/camera_info: Color camera calibration data.~/rgb/gray/rect/image: Grayscale rectified image.~/rgb/gray/rect/camera_info: Grayscale camera calibration data.~/rgb/color/raw/image: Color unrectified image.~/rgb/color/raw/camera_info: Color raw calibration data.~/rgb/gray/raw/image: Grayscale unrectified image.~/rgb/gray/raw/camera_info: Grayscale raw calibration data.
- RGB channel
Sensors data
~/imu/data~/imu/data_raw~/temperature~/left_cam_imu_transform
Image Transport #
The ROS 2 wrapper supports the stack image_transport introduced with ROS 2 Crystal Clemmys.
All the image topics are published using the image_transport::Publisher object, correctly associating the sensor_msgs::msg::CameraInfo message to the relative sensor_msg::msg::Image message and creates the relative compressed image streams.
We recommend using the standard available image transports:
raw: uncompressed imagecompressed: JPEG or PNG compressed imagetheora: Ogg Theora compressed imagecompressedDepth: depth image compressed with a lossless algorithm
For proper association between images and their corresponding camera information, the ZED ROS 2 Wrapper also publishes camera_info topics for all compressed image streams:
~/rgb/color/rect/image/camera_info~/rgb/gray/rect/image/camera_info~/rgb/color/raw/image/camera_info~/rgb/gray/raw/image/camera_info
📌 Note: The image transport topics are not advertised if NITROS is enabled. Please refer to the dedicated section about NVIDIA® Isaac ROS Nitros for more details.
NVIDIA® Isaac ROS Nitros #
The ZED ROS 2 Wrapper supports the NVIDIA® Isaac™ ROS Nitros package for zero-copy transport of ROS messages using NVIDIA® GPUDirect® RDMA.
NVIDIA® Isaac ROS Nitros integration is enabled and used only if the required packages are manually installed. They are not added as a dependency because this is an optional feature.
For more information about the installation and usage of the NVIDIA® Isaac™ ROS packages, please refer to the dedicated section of the documentation: ZED Isaac™ ROS Integration Overview.
QoS profiles #
All the topics are configured by default to use the following ROS 2 QoS profile:
- Reliability: RELIABLE
- History (Depth): KEEP_LAST (10)
- Durability: VOLATILE
- Lifespan: Infinite
- Deadline: Infinite
- Liveliness: AUTOMATIC
- Liveliness lease duration: Infinite
📌 Note: Read the official ROS 2 documentation about the QoS and the relatived settings for details.
The QoS settings can be modified by changing the relative parameters in the YAML files, as described in this official ROS 2 design document.
When creating a subscriber, be sure to use a compatible QOS profile according to the following tables:
Compatibility of QoS durability profiles:
| Publisher | Subscriber | Connection | Result |
|---|---|---|---|
| Volatile | Volatile | Yes | Volatile |
| Volatile | Transient local | No | - |
| Transient local | Volatile | Yes | Volatile |
| Transient local | Transient local | Yes | Transient local |
Compatibility of QoS reliability profiles:
| Publisher | Subscriber | Connection | Result |
|---|---|---|---|
| Best effort | Best effort | Yes | Best effort |
| Best effort | Reliable | No | - |
| Reliable | Best effort | Yes | Best effort |
| Reliable | Reliable | Yes | Reliable |
In order for a connection to be made, all of the policies that affect compatibility must be compatible. For instance, if a publisher-subscriber pair has compatible reliability QoS profiles, but incompatible durability QoS profiles, the connection will not be made.
📌 Note: for a detailed list of all the compatibility settings, please refer to the official ROS 2 documentation.
Configuration parameters #
Specify your launch parameters in the common_mono.yaml, zedxonegs.yaml, and zedxone4k.yaml files available in the folder zed_wrapper/config.
General parameters #
Namespace: general
common_mono.yaml
| Parameter | Description | Value |
|---|---|---|
| serial_number | Select a ZED camera by its Serial Number | int |
| pub_resolution | The resolution used for output. ‘NATIVE’ to use the same general.grab_resolution - CUSTOM to apply the general.pub_downscale_factor downscale factory to reduce bandwidth in transmission | string,‘NATIVE’‘SVGA’, ‘VGA’, ‘LOW’ |
| pub_downscale_factor | Rescale factor used to rescale image before publishing when ‘pub_resolution’ is ‘CUSTOM’ | double |
| gpu_id | Select a GPU device for depth computation | int |
| optional_opencv_calibration_file | Optional path where the ZED SDK can find a file containing the calibration information of the camera computed with OpenCV. | string |
* Dynamic parameter
zedxonegs.yaml, and zedxone4k.yaml
| Parameter | Description | Value |
|---|---|---|
| camera_model | Type of Stereolabs camera | string, zedxonegs, zedxone4k |
| camera_name | User name for the camera, can be different from camera model | string |
| grab_resolution | The native camera grab resolution. | string, ‘HD1200’, ‘QHDPLUS’, ‘HD1080’, ‘SVGA’, ‘AUTO’ |
| grab_frame_rate | ZED SDK internal grabbing rate | int, ‘15’,‘30’,‘60’,‘90’,‘100’,‘120’ |
Streaming server parameters #
Namespace: stream_server
common_mono.yaml
| Parameter | Description | Value |
|---|---|---|
| stream_enabled | enable the streaming server when the camera is open | true, false |
| codec | ifferent encoding types for image streaming: ‘H264’, ‘H265’ | string |
| port | Port used for streaming. Port must be an even number. Any odd number will be rejected. | int |
| bitrate | Streaming bitrate (in Kbits/s) used for streaming. See doc | int, [1000 - 60000] |
| gop_size | The GOP size determines the maximum distance between IDR/I-frames. Very high GOP size will result in slightly more efficient compression, especially on static scenes. But latency will increase. | int, [max 256] |
| adaptative_bitrate | Bitrate will be adjusted depending the number of packet dropped during streaming. If activated, the bitrate can vary between [bitrate/4, bitrate]. | true, false |
| chunk_size | Stream buffers are divided into X number of chunks where each chunk is chunk_size bytes long. You can lower chunk_size value if network generates a lot of packet lost: this will generates more chunk for a single image, but each chunk sent will be lighter to avoid inside-chunk corruption. Increasing this value can decrease latency. | int, [1024 - 65000] |
| target_framerate | Framerate for the streaming output. This framerate must be below or equal to the camera framerate. Allowed framerates are 15, 30, 60 or 100 if possible. Any other values will be discarded and camera FPS will be taken. | int |
Video parameters #
Namespace: video
common_mono.yaml
| Parameter | Description | Value |
|---|---|---|
| saturation* | Image saturation | int, [0,8] |
| sharpness* | Image sharpness | int, [0,8] |
| gamma* | Image gamma | int, [0,8] |
| auto_whitebalance* | Enable the auto white balance | true, false |
| whitebalance_temperature* | White balance temperature | int [28,65] |
| exposure_time* | Defines the real exposure time in microseconds. Recommended to control manual exposure (instead of video.exposure setting) | int, [28,30000] |
| auto_exposure_time_range_min* | Defines the minimum range of exposure auto control in micro seconds | int |
| auto_exposure_time_range_max* | Defines the maximum range of exposure auto control in micro seconds | int |
| exposure_compensation* | Defines the Exposure-target compensation made after auto exposure. Reduces the overall illumination target by factor of F-stops. | int, [0 - 100] |
| analog_gain* | Defines the real analog gain (sensor) in mDB. Recommended to control manual sensor gain (instead of video.gain setting) | int, [1000-16000]. |
| auto_analog_gain_range_min* | Defines the minimum range of sensor gain in automatic control | int |
| auto_analog_gain_range_max* | Defines the maximum range of sensor gain in automatic control | int |
| digital_gain* | Defines the real digital gain (ISP) as a factor. Recommended to control manual ISP gain (instead of video.gain setting) | int, [1-256] |
| auto_digital_gain_range_min* | Defines the minimum range of digital ISP gain in automatic control | int |
| auto_digital_gain_range_max* | Defines the maximum range of digital ISP gain in automatic control | int |
| denoising* | Defines the level of denoising applied on both left and right images | int, [0-100] |
| enable_24bit_output | Enable BGR 24-bit output for images (instead of 32-bit) | true, false |
| publish_rgb | Enable publishing of RGB image streams | true, false |
| publish_raw | Enable publishing of raw (unrectified) image streams | true, false |
| publish_gray | Enable publishing of grayscale image streams | true, false |
* Dynamic parameter
zedxone4k.yaml
| Parameter | Description | Value |
|---|---|---|
| enable_hdr | When set to true, the camera will be set in HDR mode if the camera model and resolution allows it | true, false |
Sensors parameters #
Namespace: sensors
common_mono.yaml
| Parameter | Description | Value |
|---|---|---|
| publish_imu_tf | Enable/disable the IMU TF broadcasting | true, false |
| sensors_pub_rate* | Frequency of publishing of sensors data | double |
| publish_imu | Advertise the IMU topic that is published only if a node subscribes to it | true, false |
| publish_imu_raw | Advertise the raw IMU topic that is published only if a node subscribes to it | true, false |
| publish_cam_imu_transf | Advertise the CAMERA-IMU transformation topic that is published only if a node subscribes to it | true, false |
| publish_temp | Advertise the temperature topics that are published only if a node subscribes to them | true, false |
* Dynamic parameter
Debug parameters #
Namespace: debug
common_mono.yaml
| Parameter | Description | Value |
|---|---|---|
| sdk_verbose | Set the verbose level of the ZED SDK | int, 0 -> disable |
| sdk_verbose_log_file | Path to the file where the ZED SDK will log its messages. If empty, no file will be created. The log level can be set using the sdk_verbose parameter. | string |
| use_pub_timestamps | Use the current ROS time for the message timestamp instead of the camera timestamp. This is useful to test data communication latency. | true, false |
| debug_common | Enable general debug log outputs | true, false |
| debug_video_depth | Enable videodebug log outputs | true, false |
| debug_camera_controls | Enable camera controls debug log outputs | true, false |
| debug_sensors | Enable sensors debug log outputs | true, false |
| debug_streaming | Enable streaming debug log outputs | true, false |
| debug_advanced | Enable advanced debug log outputs | true, false |
| debug_nitros | Enable Nitros debug log outputs | true, false |
| disable_nitros | If available, disable NITROS usage for debugging and testing purposes | true, false |
Dynamic parameters #
The ZED node lets you reconfigure many parameters dynamically during the execution of the node. All the dynamic parameters are indicated with a * in the list above and with the tag [DYNAMIC] in the comments of the YAML files.
You can set the parameters using the CLI command ros2 param set, e.g.:
ros2 param set /zed/zed_node video.exposure_time 5000
if the parameter is set successfully, you will get a confirmation message:
Set parameter successful
In the case you tried to set a parameter that’s not dynamically reconfigurable, or you specified an invalid value, you will get this type of error:
ros2 param set /zed/zed_node video.exposure_time 0
Setting parameter failed: Parameter {video.exposure_time} doesn't comply with integer range.
and the ZED node will report a warning message explaining the error type:
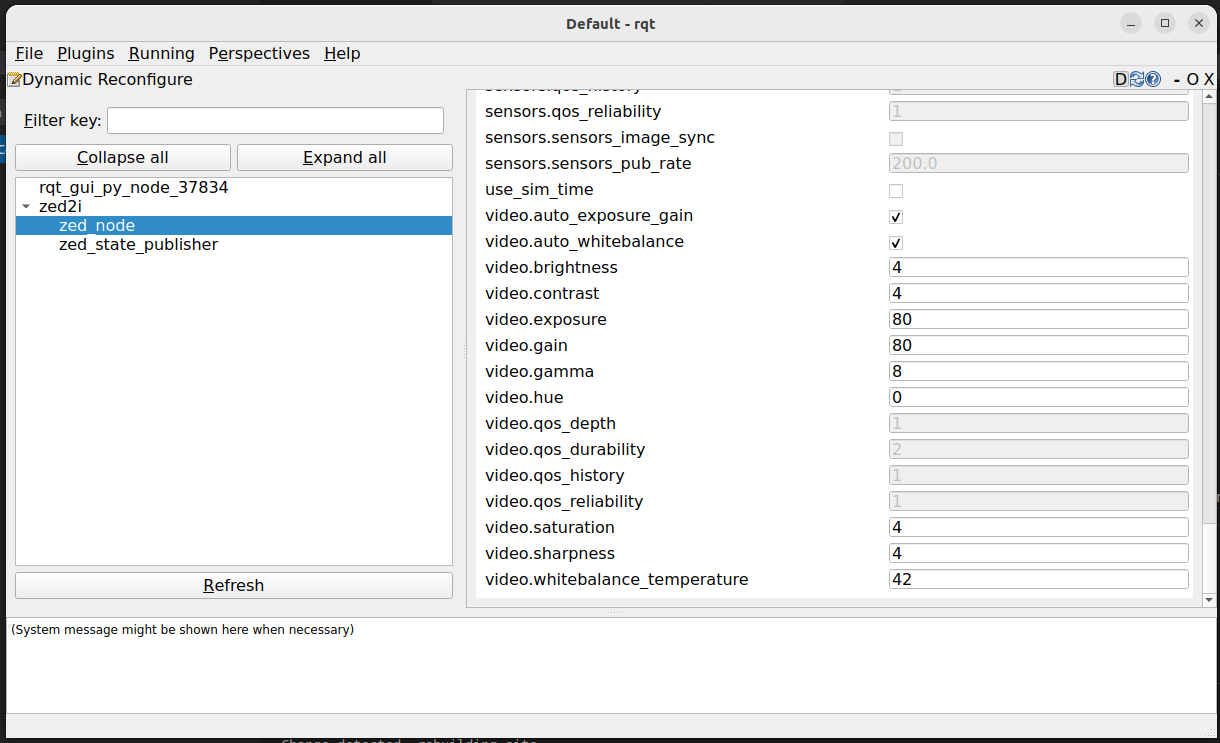
You can also use the Configuration -> Dynamic Reconfigure plugin of the rqt tool to dynamically set parameters by using a graphic interface.
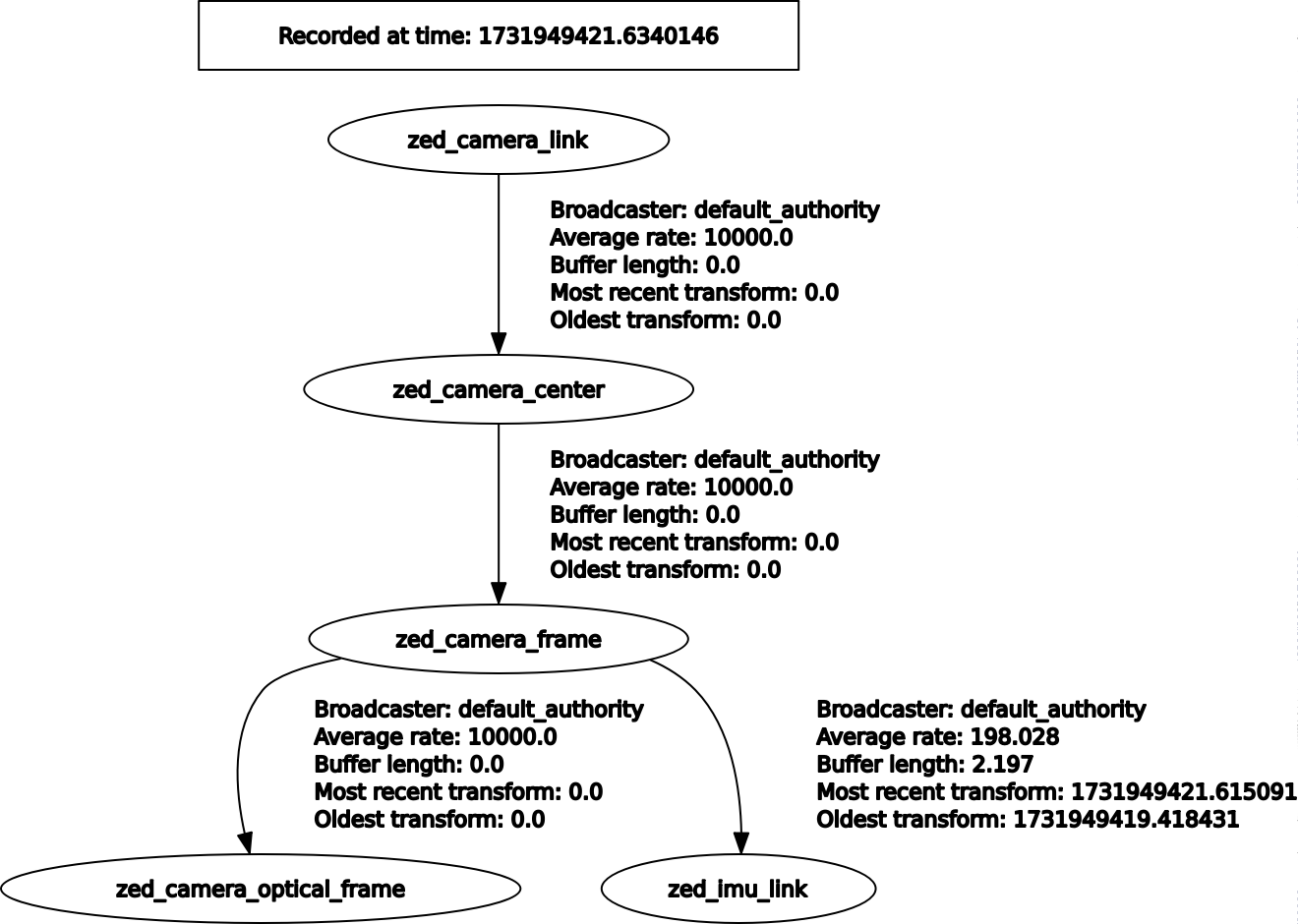
Transform frames #
The ZED ROS 2 wrapper broadcasts multiple coordinate frames that each provides information about the camera’s position and orientation. If needed, the reference frames can be changed in the launch file.
<camera_name>_camera_linkis the current position and orientation of the ZED base center. It corresponds to the bottom central fixing hole.<camera_name>_camera_centeris the current position and orientation of ZED middle baseline, determined by visual odometry and the tracking module.<camera_name>_camera_frameis the position and orientation of the ZED’s CMOS sensor.<camera_name>_camera_opticalis the position and orientation of the ZED’s camera optical frame.<camera_name>_imu_linkis the origin of the inertial data frame (not available with ZED).
Services #
The ZED node provides the following services:
~/enable_streaming: enable/disable a local streaming server.
Services can be called using the rqt graphical tool by enabling the plugin Plugins -> Services -> Service caller.
It is possible to call a service also by using the CLI command ros2 service call.
For example to start Object Detection for the ZED2 camera:
ros2 service call /zed/zed_node/enable_streaming std_srvs/srv/SetBool "{data: True}"
and the service server will reply:
requester: making request: std_srvs.srv.SetBool_Request(data=True)
response:
std_srvs.srv.SetBool_Response(success=True, message='Streaming Server started')
Assigning a GPU to a camera #
To improve performance, you can specify the gpu_id of the graphic card that will be used for the depth computation in the common_mono.yaml configuration file. The default value (-1) will select the GPU with the highest number of CUDA cores. When using multiple ZEDs, you can assign each camera to a GPU to increase performance.