Using Video Capture with ROS 2
Video with RViz 2
In this tutorial, you will learn how to configure your own RViz 2 session to see only the video data that you require.
To visualize the video stream published by the ZED node, you can use two different plugins:
Camera: Displays an image from a camera, with the visualized world rendered behind itImage: Displays an image from a topic of typesensor_msgs/Image
Camera
The Camera plugin allows you to visualize an image from a topic of type sensor_msgs/Image. It acts as if the source of the image is placed on its virtual frame and renders all virtual objects in front of it.
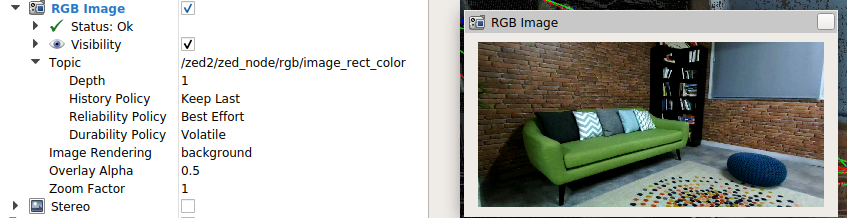
Key parameters:
Topic: Selects the image topic to visualize from the list of available images in the combo boxDepth: The depth of the incoming message queueHistory policy: Set the QoS history policy.Keep Lastis suggested for performance and compatibilityReliability Policy: Set the QoS reliability policy.Best Effortis suggested for performance,Reliableis used for compatibilityDurability Policy: Set the QoS durability policy.Volatileis suggested for compatibility
By expanding Visibility, you can select/deselect what will be visible in the camera view. Only active plugins can be selected.
Image
The Image plugin allows you to visualize an image from a topic of type sensor_msgs/Image.

Key parameters:
Topic: Selects the image topic to visualize from the list of available images in the combo boxDepth: The depth of the incoming message queueHistory policy: Set the QoS history policy.Keep Lastis suggested for performance and compatibilityReliability Policy: Set the QoS reliability policy.Best Effortis suggested for performance,Reliableis used for compatibilityDurability Policy: Set the QoS durability policy.Volatileis suggested for compatibility
Video subscribing in C++
In this tutorial, you will learn how to write a simple C++ node that subscribes to messages of type
sensor_msgs/Image. This lets you retrieve the Left and Right rectified images published by the ZED node.
Introduction
Open a new console and use this command to connect the camera to the ROS 2 network:
The old launch command ros2 launch zed_display_rviz2 display_<camera model>.launch.py is now obsolete and will be removed in a future release of the wrapper.
The ZED node will start to publish image data in the network only if there is another node that subscribes to the relative topic.
Running the tutorial
If you properly followed the ROS 2 Examples Installation Guide, the executable of this tutorial has been compiled and you can run the subscriber node using this command:
The tutorial node subscribes to generic left_image and right_image topics, so a remapping is required to connect to the correct topics published by the ZED node:
ZED:
If the ZED node is running and a camera is connected or you have loaded an SVO file, you will receive the following stream of messages confirming that you have correctly subscribed to the ZED image topics:
The code
The source code of the subscriber node zed_video_sub_tutorial.cpp:
The code explained
The following is a brief explanation of the source code above:
These callbacks are executed when the subscriber node receives a message of type sensor_msgs/Image that matches the subscribed topic.
The parameter of the callback is a std::shared_ptr to the received message. This means you don’t have to worry
about memory management.
The callback code is very simple and demonstrates how to access the fields in a message;
in this case, the height and width of the image and the topic timestamp.
The main function is divided in two main parts:
Node declaration:
First, the ROS 2 environment is initialized with the rclcpp::init command. Then, the zed_video_tutorial node is created and a shared pointer g_node to it is initialized.
The most important lesson of the above code is how the subscribers are defined:
The two auto variables right_sub and left_sub are two rclcpp::Subscription objects.
A rclcpp::Subscription is a ROS object that listens to the network and waits for its own topic message to be available.
When a message is received, it executes the callback assigned to it.
We declared two subscribers: one for the left rectified image and one for the right rectified image.
- The subscriber to the
right_imagetopic calls theimageRightRectifiedCallbackfunction when it receives a message of typesensor_msgs/Imagethat matches that topic - The subscriber to the
left_imagetopic calls theimageLeftRectifiedCallbackfunction when it receives a message of typesensor_msgs/Imagethat matches that topic
It is important that the two subscriptions use a QOS profile compatible with the QOS profile of the publisher of the topics.
In this case, the QOS profile is configured to keep the last received 10 messages with “best effort” reliability and “volatile” durability. This configuration is highly compatible with many possible publisher configurations.
For more information about QoS compatibility, refer to the ZED node guide
The code of this tutorial instantiates a rclcpp::Node without subclassing it. This was the typical usage model in the original ROS, but unfortunately, this style of coding is not compatible with composing multiple nodes into a single process. Thus, it is no longer the recommended style for ROS 2.
Please refer to the “Depth sensing” tutorial for C++ tutorials written with a coding style more targeted to ROS 2.
Conclusion
The full source code of this tutorial is available on GitHub in the zed_video_tutorial sub-package.
Along with the node source code are the package.xml and CMakeLists.txt files that complete the tutorial package.