Using Plane Detection with ROS 2
In this tutorial, you will learn how to exploit the Plane Detection capabilities of the ZED SDK to detect the planes in the environment where a ZED camera is operating.
Start a plane detection task
The ZED ROS 2 node subscribes to the topic /clicked_point of type geometry_msgs/PointStamped, usually published by RViz 2.
When a message on the topic /clicked_point is received, the node searches for the first plane hit by a virtual ray starting from the camera optical center and virtually passing through the received 3D point.
If a plane is found, its position and orientation are calculated, the 3D mesh is extracted and all the useful plane information is published as a custom zed_interfaces/PlaneStamped message on the topic /<camera_model>/<node_name>/plane.
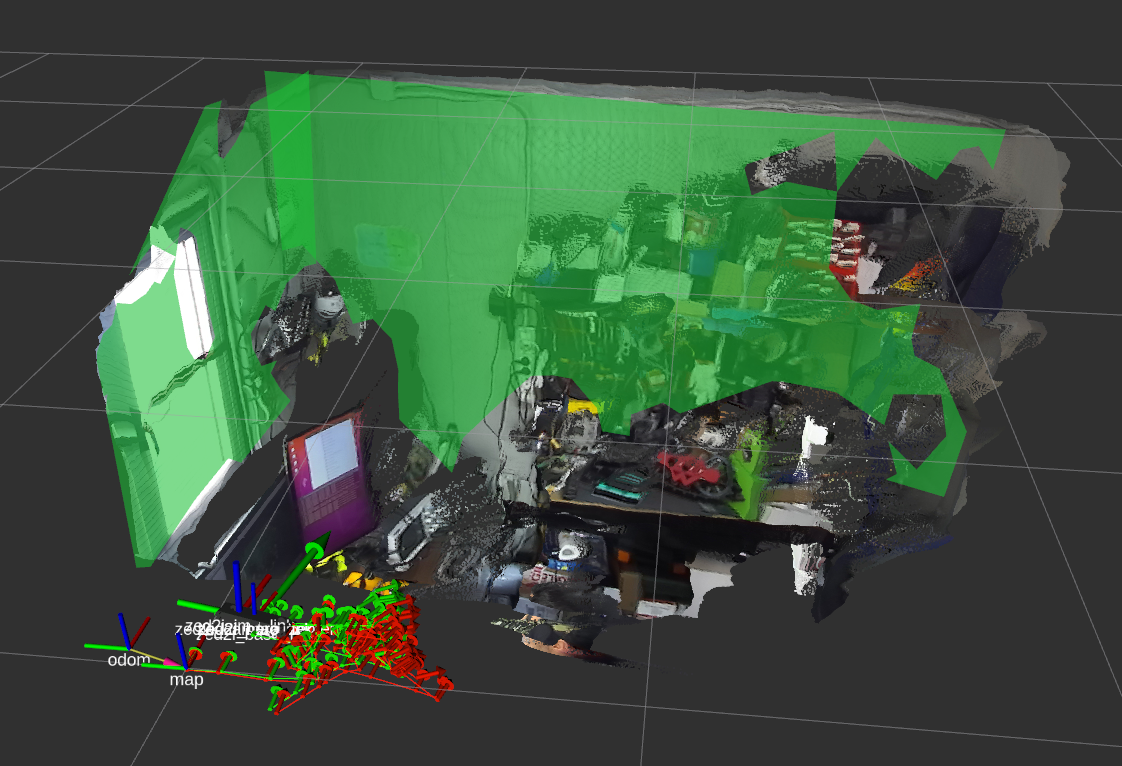
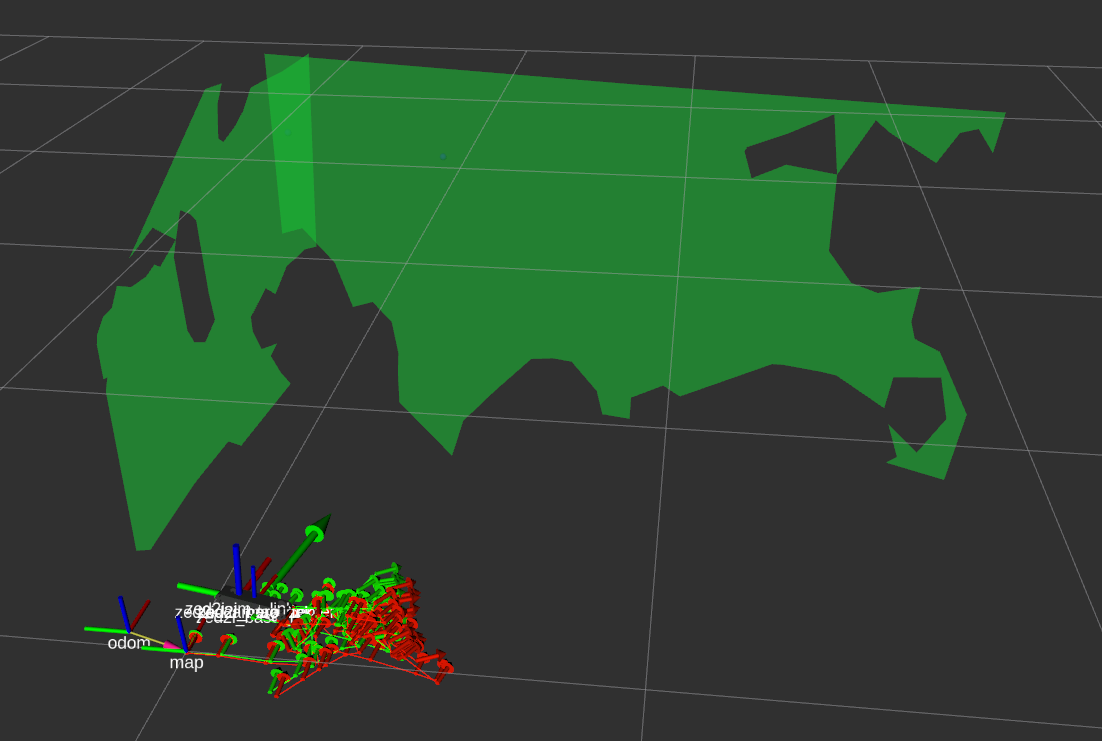
A second message of type visualization_msgs/Marker with information useful for visualization is published on the topic /<camera_model>/<node_name>/plane_marker in order to display the plane using a Marker display plugin in RViz 2.
Logging
When a plane detection is started, the log of the ROS wrapper will show the following information:
RViz 2
The RViz 2 GUI lets you easily start a plane detection task and displays the results of the detection.
Start a plane detection
To publish a /clicked_point message and start a plane detection, the Publish Point button must be enabled and a point in the 3D view or the camera view must be clicked.
Configure RViz to display the results
The Marker plugin allows you to visualize the information of the detected planes.

Key parameters:
Topic: The topic that contains the information relative to the detected planes: e.g./zed/zed_node/plane_markerDepth: The size of the message queue. Use at least a value of2to not lose messages.History policy: Set the QoS history policy.Keep Lastis suggested for performance and compatibility.Reliability Policy: Set the QoS reliability policy.Best Effortis suggested for performance and compatibility.Durability Policy: Set the QoS durability policy.Volatileis suggested for compatibility.Namespaces: The list of available information:plane_hit_points: Select to display a sphere where the click has been received.plane_meshes: Select to display all the meshes of the detected planes.
Detected Plane message
The custom zed_interfaces/PlaneStamped message is defined in the zed-ros2-interfaces repository.