Using Depth Perception with ROS 2
Depth with RViz 2
In this tutorial, you will learn in detail how to configure your own RViz session to see only the depth data that you require.
Depth information can be visualized in many different ways: 2D depth images, 3D point clouds, 3D registered depth clouds, and the confidence image to name a few.
Depth image
To visualize a depth image, you can use the simple Image plugin since the depth data are published on topics of type sensor_msgs/Image. It differs from a “normal” image in that the data is encoded in 32-bit (floating point) rather than 8-bit.
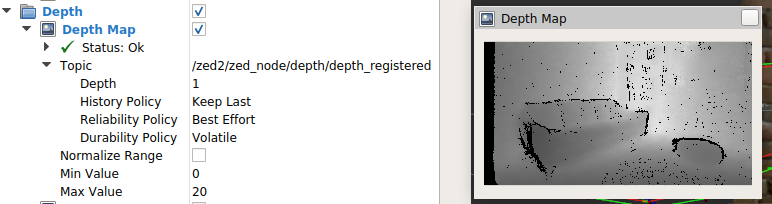
The parameters are the same as for Image (see the Video tutorial) with three additions:
Normalize range: Since a floating point image is not directly rendered, it is converted to an 8-bit grayscale image. Enabling this field means the normalization range is automatically calculatedMin value: IfNormalize rangeis unchecked, you can manually set the minimum depth range in metersMax value: IfNormalize rangeis unchecked, you can manually set the maximum depth range in meters
Manually setting the normalization range is useful if you know the maximum value measured for the depth and you want to keep the image scale static.
Pointcloud
To directly visualize a topic of type sensor_msgs/PointCloud2 you can use the PointCloud2 plugin.
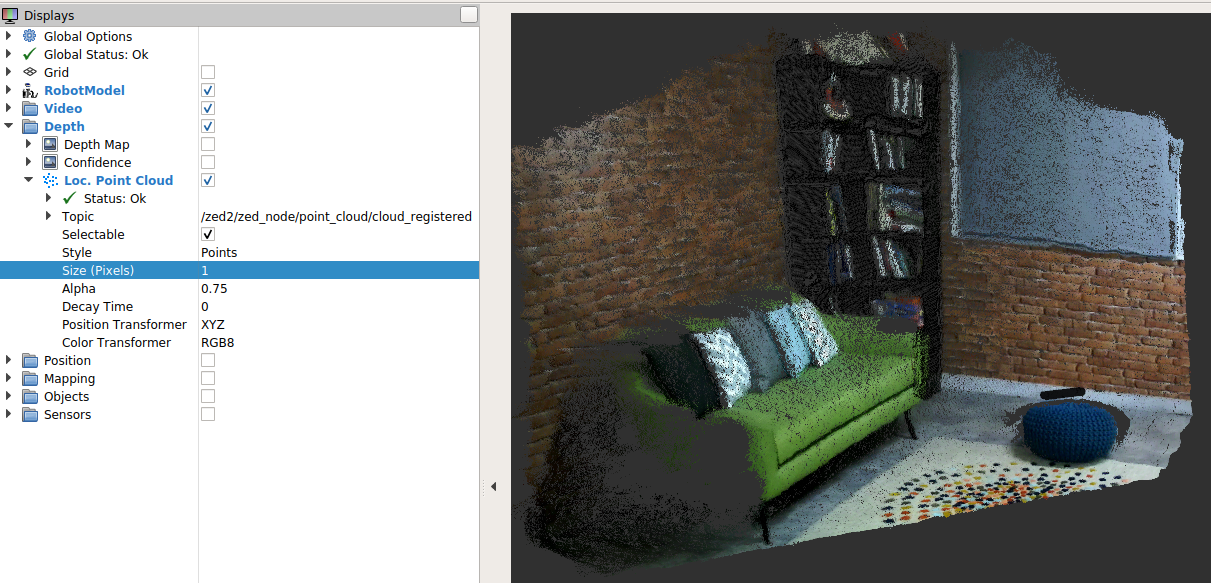
Key parameters:
Topic: Selects the topic to visualize from the list of available point cloud messagesDepth: The depth of the incoming message queueHistory policy: Set the QoS history policy.Keep Lastis suggested for performance and compatibilityReliability Policy: Set the QoS reliability policy.Best Effortis suggested for performance,Reliableis used for compatibilityDurability Policy: Set the QoS durability policy.Volatileis suggested for compatibilityStyle: The style used to render each point. UsePointsandSize=1to maximize FPSColor transformer: Selects how points are colored. UseRGB8to match the color image pixels to the corresponding depth pixels. UseAxis colorto use a color proportional to the value of theAxisvalue (e.g.Zto use a color scale proportional to the distance from the floor orXto use a color proportional to the distance from the camera)
If mapping is enabled (see the mapping.mapping_enabled parameter), the PointCloud2 plugin is also used to visualize the fused point cloud produced by the mapping module, by subscribing to the topic /zed/zed_node/point_cloud/fused_cloud_registered.
Confidence
To visualize the Confidence Map as an image, you can use the Image plugin subscribing to the topic ~/confidence/confidence_image.
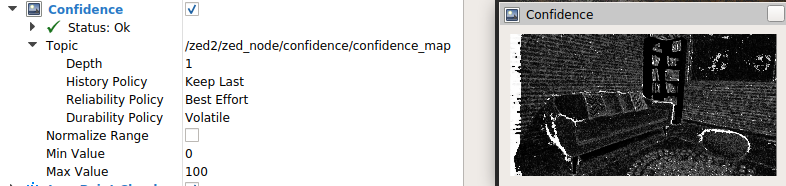
The lighter a pixel, the more reliable its corresponding depth value is.
Depth subscribing in C++
In this tutorial, you will learn how to write a simple C++ node that subscribes to messages of type
sensor_msgs/Image in order to retrieve depth images published by the ZED node and to get the measured distance at the center of the image.
Introduction
Open a new console and use this command to connect the camera to the ROS 2 network:
The ZED node will start to publish image data in the network only if there is another node that subscribes to the relative topic.
Running the tutorial
If you properly followed the ROS 2 Examples Installation Guide, the executable of this tutorial has been compiled and you can run the subscriber node using this command:
The tutorial node subscribes to generic depth topic, so a remapping is required to connect to the correct topic published by the ZED node:
If the ZED node is running and a camera is connected or you have loaded an SVO file, you will receive the following stream of messages confirming that you are correctly subscribing to the ZED image topics:
nan values for depths are reported if the central pixel of the image does not contain a valid depth measure (occlusion, flare, low textured surface, …).
The code
The source code of the subscriber node zed_depth_sub_tutorial.cpp:
The code explained
The tutorial is written using the new concept of Component introduced in ROS 2 in order to take advantage of the node composition capabilities.
A component named MinimalDepthSubscriber is created subclassing the ROS 2 object rclcpp::Node.
In the constructor, we initialize the parent class Node with the name of our node, zed_depth_tutorial:
The constructor mainly defines mDepthSub, a std::SharedPtr to an object that creates a subscriber in the node. The subscriber checks for topics of type depth and recalls the callback function MinimalDepthSubscriber::depthCallback every time it receives one of them.
ROS 2 uses the new constructs available with C++11 and C++14, so to bind the callback (a class method in this case) to the mDepthSub object we use the form
std::bind(&MinimalDepthSubscriber::depthCallback, this, _1).
It is important that the subscription use a QOS profile compatible with the QOS profile of the publisher of the topics.
In this case, the QOS profile is configured to keep the last received 10 messages with “best effort” reliability and “volatile” durability. This configuration is highly compatible with many possible publisher configurations.
For more information about QoS compatibility, refer to the ZED node guide
Now we must define the callback to execute when one of the subscribed topics is received:
This callback is executed when the subscriber node receives a message of type sensor_msgs/Image that matches the subscribed topic depth.
The parameter of the callback is a std::shared_ptr to the received message. This means that you don’t have to worry about memory management for it.
The callback demonstrates how to access the message data:
- The pointer to the
datafield is cast tofloat*as it is declared as a pointer to an array ofcharvalues - The image coordinates [u,v] of the center of the depth image are calculated
- Since the data are organized in a linear vector, the index of the central pixel is calculated from the image coordinates
- The measure in meters of the center point is printed on the screen
Finally, the main function is standard for a ROS 2 node that executes a single component:
The ROS 2 environment is initialized using the rclcpp::init command. Then we create a depth_node Component as a std::shared_ptr.
to the MinimalDepthSubscriber class that we defined above.
Then the code of the node is executed in the main thread using the rclcpp::spin(depth_node); command. The node will run until the user presses Ctrl+C to stop it, shut it down, and exit.
Conclusions
The full source code of this tutorial is available on GitHub in the zed_depth_tutorial sub-package.
Along with the node source code, you can find the package.xml and CMakeLists.txt files that complete the tutorial package.