ROS - Data display with RViz
ROS - Data display with RViz
The ZED ROS Wrapper packages are no longer maintained because ROS 1 reached end-of-life (EOL) on 2025-05-31 with the final Noetic release.
We recommend upgrading to ROS 2 to take advantage of the latest ZED SDK features for robotics applications.
RViz is a ROS graphical interface that allows you to visualize a lot of information, using plugins for many kinds of available topics.
The zed_display_rviz package provides four launch files (display_zed.launch, display_zedm.launch, display_zed2.launch, and display_zed2i.launch) that start preconfigured RViz sessions for the ZED, ZED-M, ZED2 and ZED2i cameras respectively. These sessions load the default RViz plugins preconfigured to show the most commonly used data from the ZED ROS infrastructure.
To create your own RViz configuration, you can use the plugins described below.
Global options
To be able to visualize the information published by the ZED camera, it is necessary to correctly configure the Global Options:
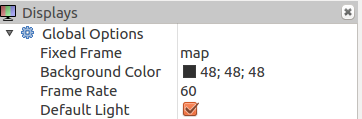
Key parameters:
Fixed frame: Indicates the name of the frame used as the reference for all the other frames. You can select any frame available in the combo box.maporodomare the best choices.Frame rate: The maximum frequency used to update the 3D view.30or60FPS are good values. Available computational power should guide your decision.
Grid
This plugin allows you to visualize a grid normally associated with the floor plane.
Key parameters:
Reference frame: The frame used as reference for the grid coordinates (normally:<fixed_frame>)Plane cell count: The size of the grid in cellsNormal cell count: The number of cells in the direction normal to the grid plane (normally:0)Cell size: Dimensions in meters of each grid cellPlane: The two axes that identify the grid plane
Robot model
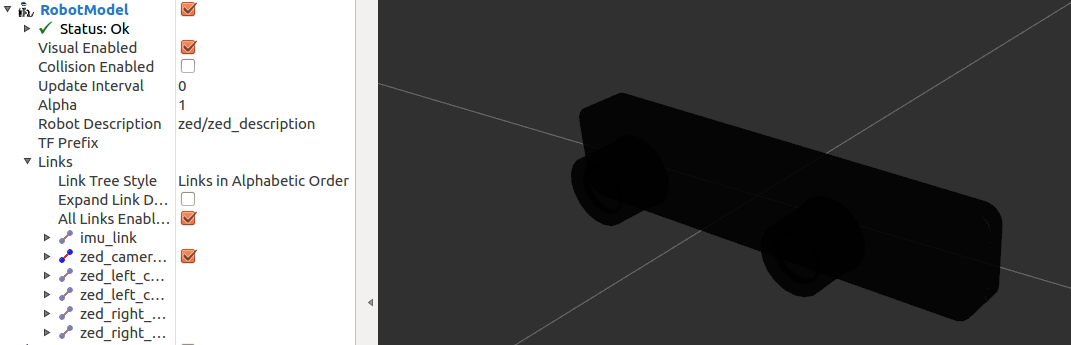
This plugin allows you to visualize the Robot Model according to its description from the URDF model.
With the ZED wrapper, you can load two Robot/Camera models for the two StereoLabs cameras: zed.urdf and zedm.urdf
Key parameters:
Visual enabled: Enable/disable the 3D visualization of the modelRobot description: The topic on which the robot description is published. Fromzed_camera.launch:<remap from="robot_description" to="zed_description" />
By expanding the Links item, you can see the whole model tree, with all the joints and the links available and the relative position and orientation in the space relative to the fixed frame.
TF
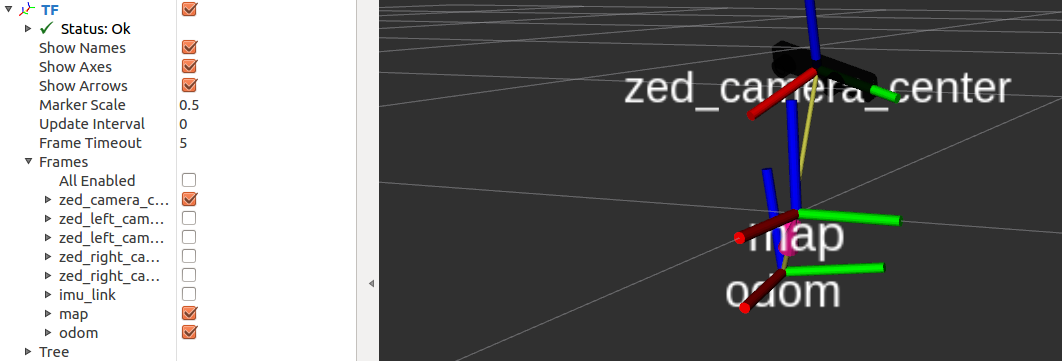
This plugin allows you to visualize the position and orientation of all the frames that compose the TF hierarchy.
Key parameters:
Show names: Enable/disable the 3D visualization of the names of the linksShow axes: Enable/disable the 3D visualization of the axes of the framesShow arrows: Enable/disable the 3D visualization of the arrows that connect the various framesUpdate interval: The update time in seconds. Leave at0to see each update
Critical to using this plugin is the ability to enable/disable visualizing individual frames. This allows you to concentrate only on the parts that are most important for your current task.
Video
Learn how to configure RViz for visualizing Video information by following the Video with RViz tutorial.
Depth Sensing and Mapping
Learn how to configure RViz for visualizing Depth information by following the Depth with RViz tutorial.
Positional Tracking
Learn how to configure RViz for visualizing Position information by following the Position with RViz tutorial.
Object Detection
Learn how to configure RViz for visualizing Detected Object information by following the Object Detection with RViz tutorial.