GStreamer - ZED Sensors CSV Sink
GStreamer - ZED Sensors CSV Sink
The ZED Sensors Data CSV Sink, zeddatacsvsink GStreamer element, is a sink that allows logging ZED Mini and ZED 2 sensors data to a CSV file.
The source code of this plugin is a complete example of how to process the ZED metadata in a GStreamer element to retrieve sensor data.
Properties
CSV Format
The following information is saved in the CSV file:
TIMESTAMP: data timestamp in [ns].STREAM_TYPE: type of stream acquired byzedsrc(seeZedInfodata structure).CAM_MODEL: camera model used to acquire data (seeZedInfodata structure).GRAB_W: width of camera frames.GRAB_H: height of camera frames.POSE_VAL: 1 if the camera pose is valid.POS_TRK_STATE: status of the positional tracking algorithm (seeZedPosedata structure).POS_X_[m]: X coordinate of the camera position in [m].POS_Y_[m]: Y coordinate of the camera position in [m].POS_Z_[m]: Z coordinate of the camera position in [m].OR_X_[rad]: orientation of the camera around the X axis in [rad].OR_Y_[rad]: orientation of the camera around the Y axis in [rad].OR_Z_[rad]: orientation of the camera around the Z axis in [rad].IMU_VAL: 1 if IMU data are valid.ACC_X_[m/s²]: acceleration value along the X axis in [m/s²].ACC_Y_[m/s²]: acceleration value along the Y axis in [m/s²].ACC_Z_[m/s²]: acceleration value along the Z axis in [m/s²].GYRO_X_[rad/s]: angular velocity around the X axis in [rad/s].GYRO_Y_[rad/s]: angular velocity around the Y axis in [rad/s].GYRO_Z_[rad/s]: angular velocity around the Z axis in [rad/s].MAG_VAL: 1 if magnetometer data are valid.MAG_X_[uT]: magnetic field value along the X axis in [µT].MAG_Y_[uT]: magnetic field value along the Y axis in [µT].MAG_Z_[uT]: magnetic field value along the Z axis in [µT].ENV_VAL: 1 if environment data are valid.TEMP_[°C]: internal camera temperature in [°C]PRESS_[hPa]: atmospheric pressure in [hPa]TEMP_VAL: 1 if camera CMOS temperatures are valid.TEMP_L_[°C]: temperature of the left CMOS sensor in [°C].TEMP_R_[°C]: temperature of the right CMOS sensor in [°C].
Example pipelines
Sensors data logging to CSV file
The following is a pipeline to acquire a stream at the default resolution with RGB and Depth data and save the sensor data to a CSV file for logging:
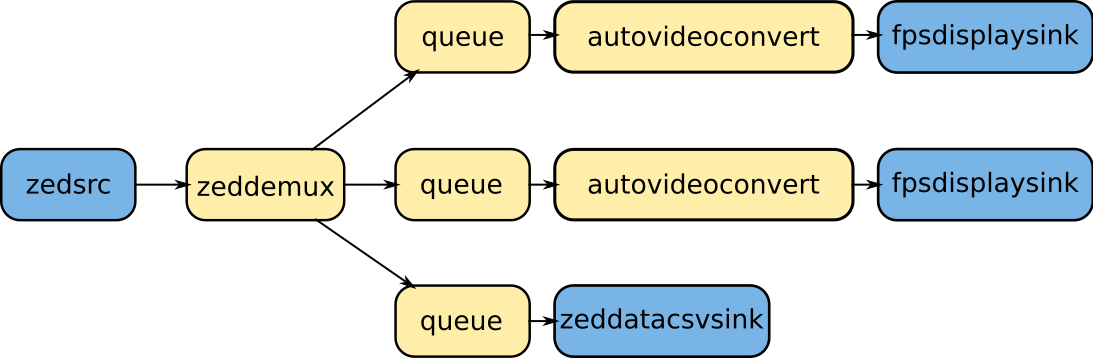
a zeddemux element is required, with stream-data=true, to create a branch of the pipeline where only sensor data flows.