Fusion
The Fusion API of the ZED SDK offers developers the ability to create applications using data from multiple cameras with ease. This module handles time synchronization and geometric calibration issues, along with 360° data fusion with noisy data coming from multiple cameras and sensor sources.
Overview
The Fusion module extends the functionalities of the ZED camera, without changing the way developers use it. It provides fine control over each camera and enables simultaneous utilization of multi-camera data. The Fusion API is continually evolving to introduce new features and enable the development of next-generation applications.
Developers can easily integrate the Fusion API into their existing applications. The module operates based on the Publish/Subscribe pattern, where the connected ZED cameras publish data, and the Fusion API subscribes to it, making data transmission seamless.
Overall, the Fusion API is a powerful tool that gives developers unprecedented control and versatility over their camera data, making it easier to build innovative applications that leverage multiple camera inputs.
Workflow
To support most setups, the Fusion API can operate with two different workflows:
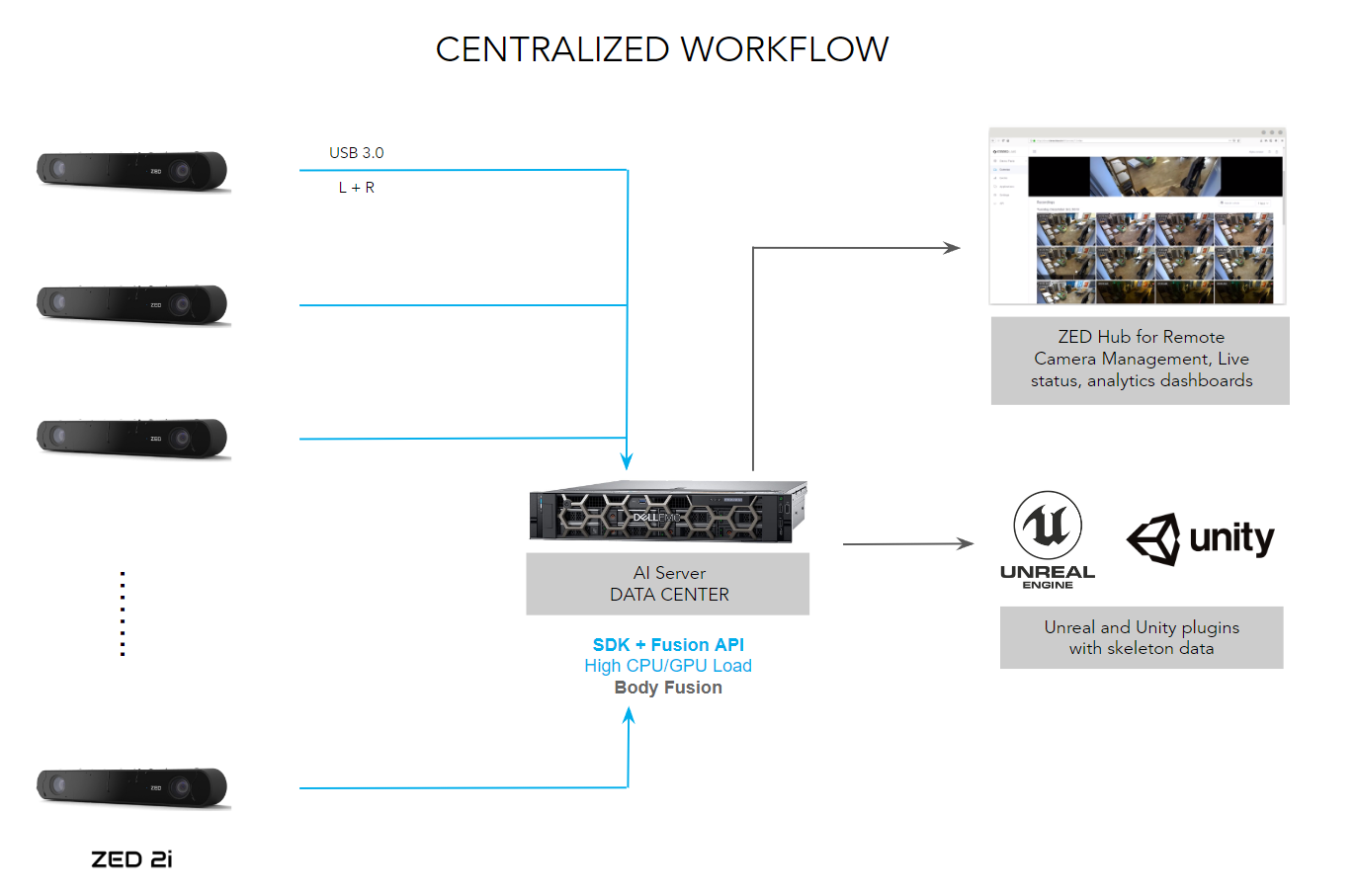
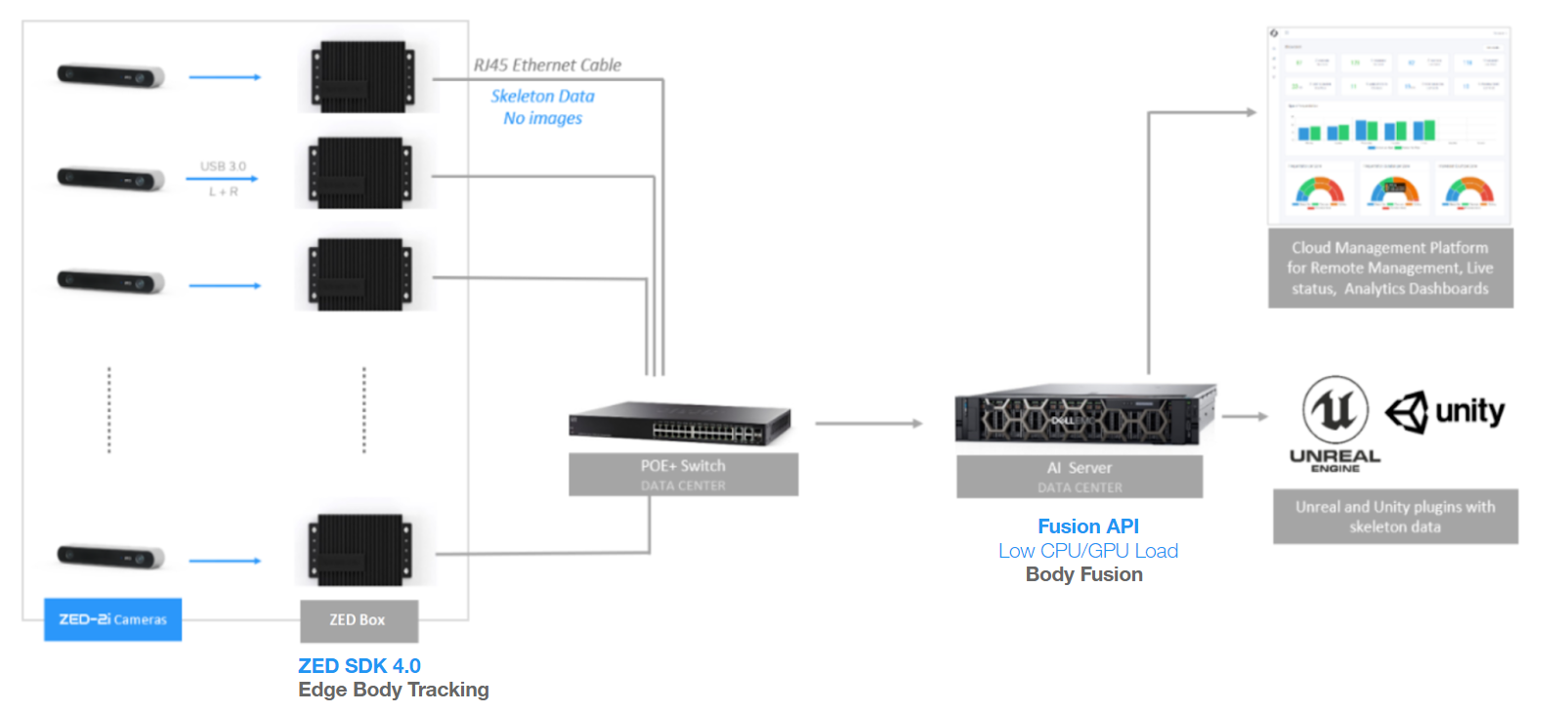
The Fusion module is lightweight (in computation resources requirements) compared to the requirements for camera publishers.
Available Modules
Currently, the Fusion API integrates the following ZED SDK modules:
- Object detection
- Body tracking
- Spatial mapping
- Positional tracking with external GNSS (refer to this page for additional details on this fusion module)
Getting Started
To achieve optimal performance and accurate results when using the Fusion API of the ZED SDK, it is crucial to calibrate your camera array. The Fusion API requires the knowledge of each camera’s position to create a common 3D world representation. Therefore, the calibration process needs to be precise; otherwise, the results obtained from the Fusion API might be inconsistent.
To simplify this process, we have developed a tool called ZED360. You can find more information on its usage in its documentation. By utilizing ZED360, you can accurately calibrate your camera array, ensuring that you get the best possible results from the Fusion API.
There are various calibration methods that you can use depending on your setup, and as the Fusion API continues to evolve, more options will be added.
The calibration process is critical, as accurate calibration is necessary to obtain reliable and precise results from the Fusion API. Proper calibration enables you to leverage the full potential of the Fusion API and its versatility.
Try it out
Once the calibration is done, you can try out the Fusion with our C++ and Python multi-camera samples, or in Unity and Unreal Engine via their Live Link implementations.
For a local workflow where all the cameras are connected to the host machine, the code samples provided above are sufficient. However, an extra step is required when the cameras are connected on different machines on the local network.
Setting up a network workflow
Each camera must run a streaming app that will compute all the required data and send it to the fusion server over the local network. This task can be performed with the following code:
Body Tracking Fusion Sender
The most important part is the call to the startPublishing method. This sets this SDK instance as a “Fusion data provider”. By default, the data will be streamed on port 30000, but this can be changed with the CommunicationParameters data structure. This can be useful if multiple cameras are connected to the same PC. In this case, each instance must use a different port.
Configuration files
To accommodate varying workflows and provide the ability to update without requiring changes to application code, a configuration file has been designed to contain all the necessary data for the Fusion API of the ZED SDK. The ZED SDK includes a support function that enables direct parsing of the configuration file and API setup based on its contents.
The configuration file contains the information for the publisher to open the camera and for the subscriber to connect to the publisher as well as the camera pose. Data is packed per camera, referred to by its serial number. The input part is separated into:
- zed: the way the publisher can open the camera. The parameters are based on the API Input_Type,
typeis the API enum INPUT_TYPE andconfigurationis a string containing input data. - fusion: the way the subscriber can contact the publisher. If your workflow is local, simply set the
typetoINTRA_PROCESS, no need to defineconfiguration. In case your workflow is over the network, set thetypetoLOCAL_NETWORKand addconfiguration|ipas a string andconfiguration|portas a number.
The file also contains the camera’s world data. It is defined by its rotation (radians) and its translation (meters). The position should be defined in UNIT::METER and COORDINATE_SYSTEM::IMAGE, the API read/write functions will handle the metric and coordinate system changes.
Configuration files are comprised of a list of parameters for each camera that should be configured in that calibration. You can find details on each attribute below: