Updates
Apr 11, 2019.ZED SDK 2.8 Brings Network Streaming, Point Cloud Scanning, and ROS 2 Wrapper
The latest release lets you stream ZED video feed across a local network, along with numerous features, improvements, and plugin updates.
The latest release lets you stream ZED video feed across a local network, along with numerous features, improvements, and plugin updates.
The ZED SDK can now stream a ZED’s video signal over a local network. An unlimited number of remote computers, also running the SDK, can use this stream as input as though they were connected over USB.
This is a game-changer for multiple-camera setups. Users can now connect as many ZED cameras as needed directly to a network and conveniently access any video feed simultaneously. This strongly facilitates collaboration between teams.
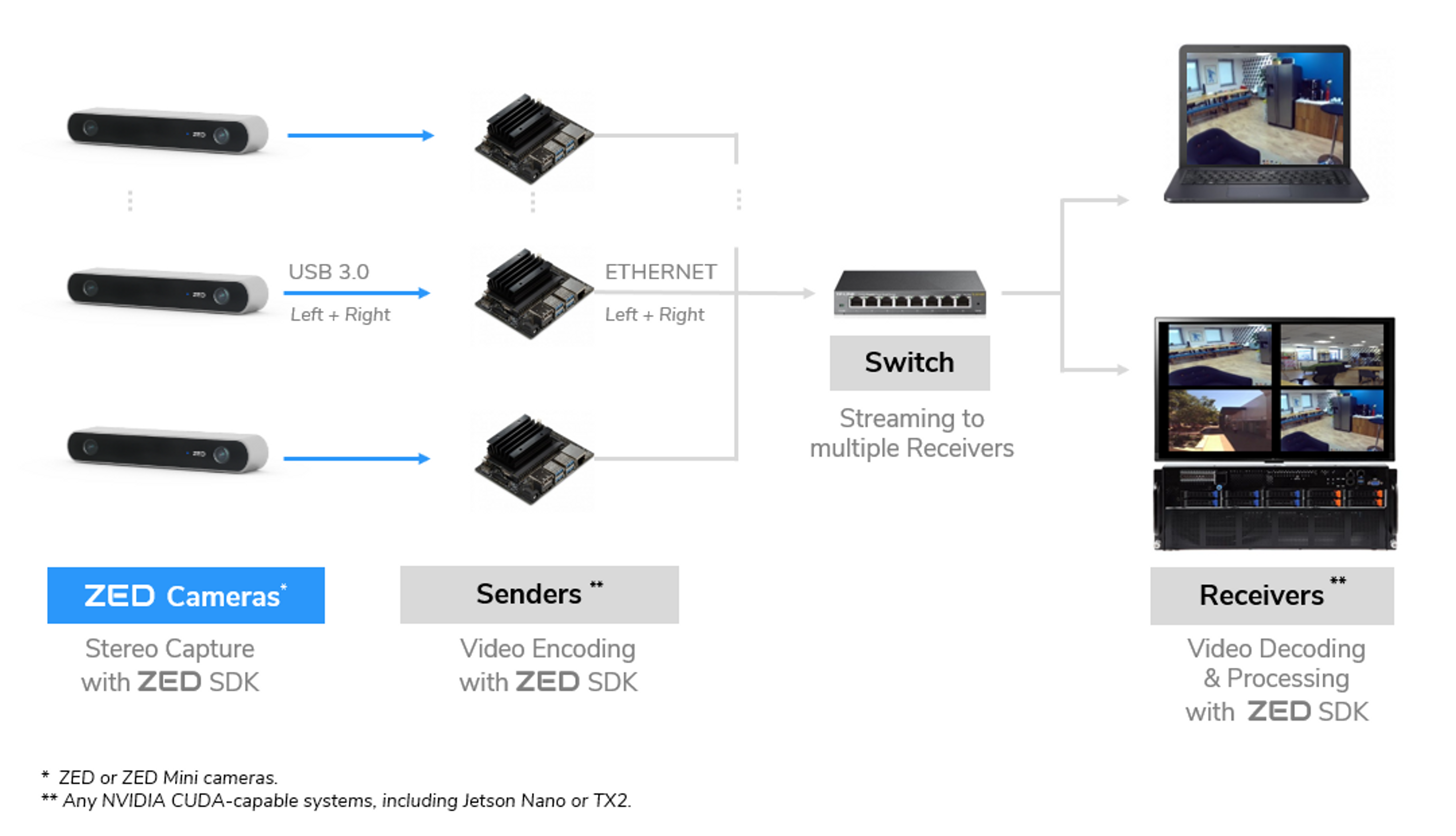
Instead of connecting directly via USB, users can now use a low-power, low-cost intermediary device such as the NVIDIA Jetson Nano ($99) to send the video feed over Ethernet. ZED cameras can therefore be deployed anywhere reachable by Ethernet cabling, facilitating long-reaches and outdoor coverage.
Also, users can now offload the processing for multiple ZED cameras onto a single powerful server. Not only does it reduce the total cost of equipment but it also improves the efficiency of compute-heavy applications, such as deep learning, by processing images in batches.
See our Multiple Cameras blog post for more info on the Streaming module, our documentation to get started, and our Streaming Sender and Streaming Receiver samples on GitHub.
In addition to meshes, our Spatial Mapping module can now scan to a fused point cloud format.

We added this feature by popular demand. It makes the ZED easier to use with popular libraries and algorithms built for point clouds, particularly those in robotics. See our updated spatial mapping documentation to see how to configure and export scans in point cloud format. This feature is available in our C++ API, ROS, and the ZEDfu app.

We’ve just released a beta version of the ZED wrapper for ROS 2 Crystal Clemmys. Features include components with life cycle design, YAML configuration, Python launch scripts, dynamic reconfiguration, publishing RGB and depth to their own topics, colored 3D point cloud publishing, and positional tracking.
Read our full blog on our ROS 2 Wrapper or download it from GitHub.

Image courtesy of Aion Robotics
The ROS plugin includes all features added to the v2.8 SDK, in addition to numerous improvements and bug fixes. Among the biggest changes are the addition of base_link to the TF tree to make it more straightforward to add ZED cameras to standard ROS configurations, a 2D mode for navigating on flat surfaces, and a rework of the launch files.
Download the new version and read the full release notes on GitHub.
Our Unity plugin now supports multiple cameras on a single PC. These cameras can be attached via USB in the traditional way, or streamed over the network via the SDK’s new streaming module.
This makes it easy to record interactive AR experiences from multiple angles, in the style of popular VR streamers.
We’ve refactored the entire plugin to make this work. That includes sample scripts, which can now take advantage of multiple cameras. For instance, projectiles in the Drone Shooter demo can impact the real world as seen from any camera.
In addition, we removed the plugin’s reliance on Unity layers to obscure the “frame” quads in ZED rigs from the wrong cameras. You can now set these cameras’ culling masks to any layer you want.
We’ve also added pose smoothing to reduce “jumps” when using spatial memory for tracking, added support for the new SteamVR Unity plugin v2 and several other improvements and fixes. See the release notes for a full list of changes and download the new plugin here.

You can now manually turn on/off the ZED’s blue LED on demand. Use this to indicate specific conditions, such as recording an SVO, when a console isn’t available.
Read the full release notes and get the new version on our Downloads page. As always, send any questions, problems or feedback to support@stereolabs.com.