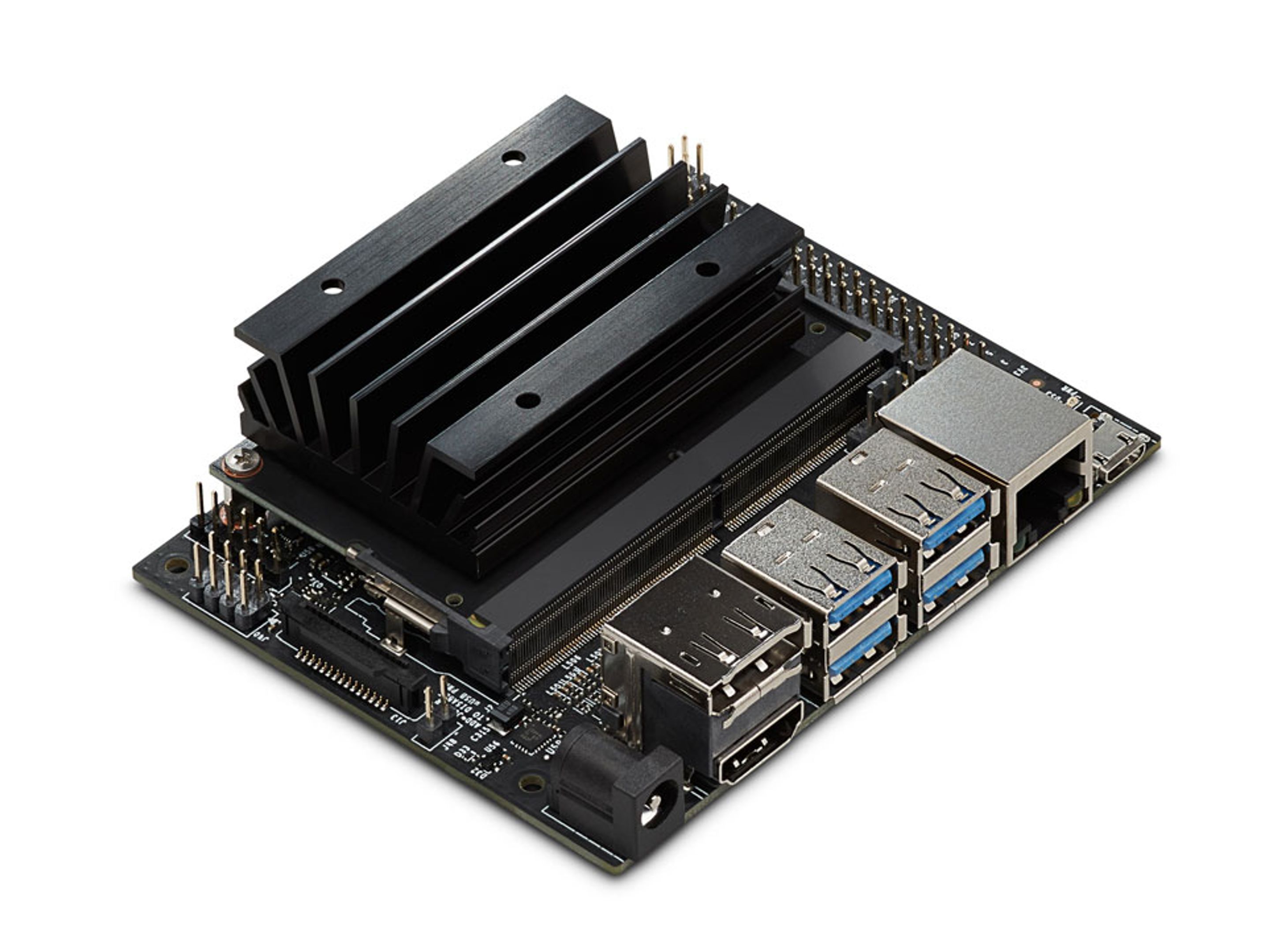
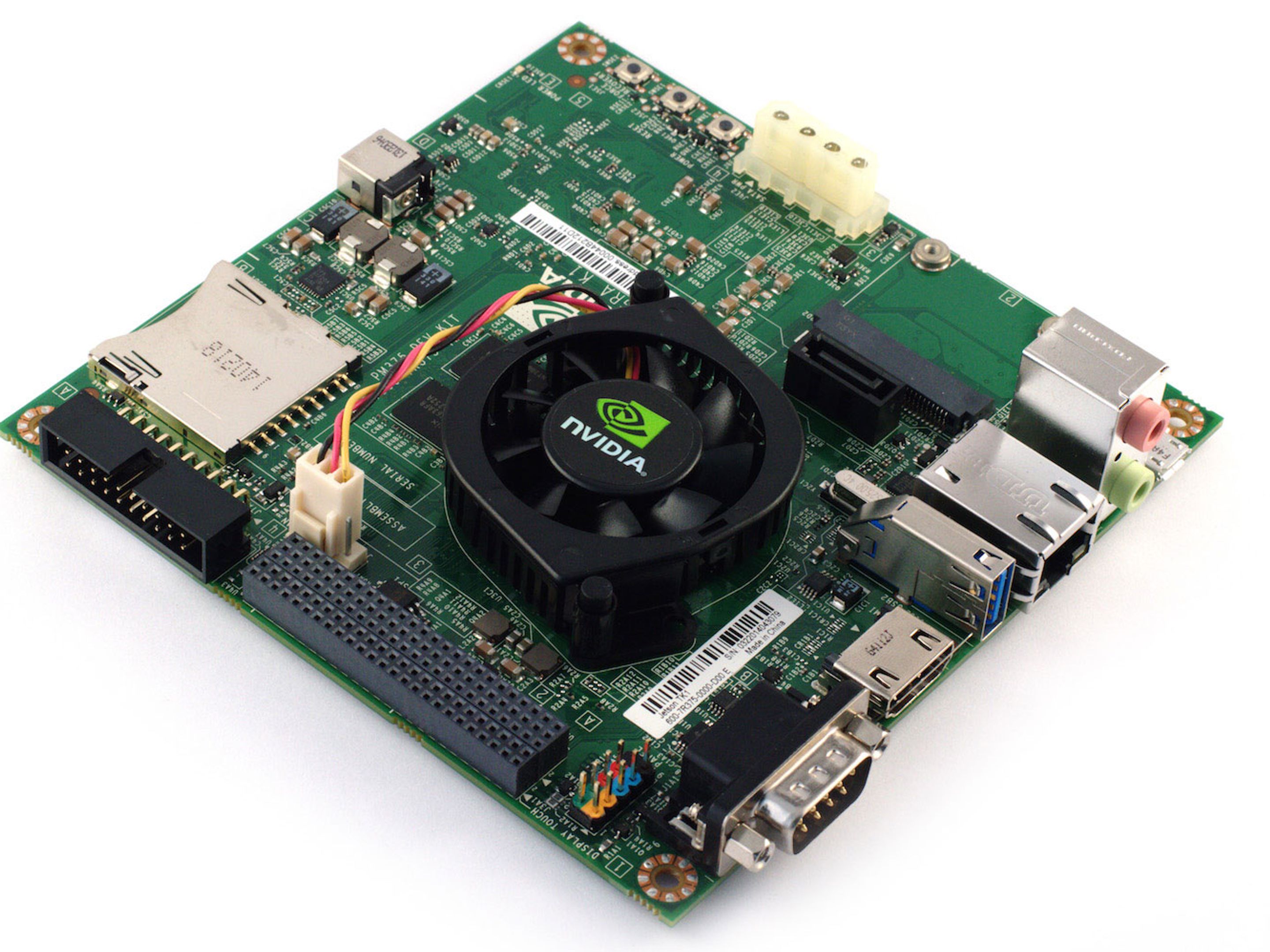
NVIDIA® Jetson™ L4T and JetPack Support
The JetPack SDK is a comprehensive solution from NVIDIA® to provide the Jetson™ embedded boards with an Operation System (Linux for Tegra) derived from Ubuntu, CUDA-X accelerated libraries, and APIs for Deep Learning, Computer Vision, Accelerated Computing, and Multimedia.